
usart通信实验_通过命令控制led
目录
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-07-03 | gingko | 初次建立 |
实验四:USART通信实验——通过命令控制LED
一、 实验目的与意义
- 了解STM32 GPIO结构。
- 了解STM32 GPIO 特征。
- 掌握USART的使用方法。
- 掌握STM32 HAL库中USART属性的配置方法。
- 掌握KEIL MDK 集成开发环境使用方法。
二、 实验设备及平台
三、 实验原理
1、STM32F7串口简介
- UART通用同步/异步串行接收/发送器,由时钟发生器、数据发送器和接收器三大部分组成。UART是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。
- 串口作为MCU的重要外部接口,同时也是软件开发重要的调试手段,其重要性不言而喻。现在基本上所有的MCU都会带有串口,STM32自然也不例外。STM32F767的串口资源相当丰富的,功能也相当强劲。iCore4双核心板所使用的STM32F767IGT6最多可提供8路串口,支持8/16倍过采样、支持自动波特率检测、支持Modbus通信、支持同步单线通信和半双工单线通讯、具有DMA等。
- UART特点:
- 全双工操作(相互独立的接收数据和发送数据)。
- 同步操作时,可主机时钟同步,也可从机时钟同步。
- 支持8和9位数据位,1或2位停止位的串行数据帧结构。
- 由硬件支持的奇偶校验位发生和检验。
- 数据溢出检测。
- 帧错误检测。
- 包括错误起始位的检测噪声滤波器和数字低通滤波器。
- 三个完全独立的中断,TX发送完成、TX发送数据寄存器空、RX接收完成。
- 支持多机通信模式。
- 支持倍速异步通信模式。
2、USART框图

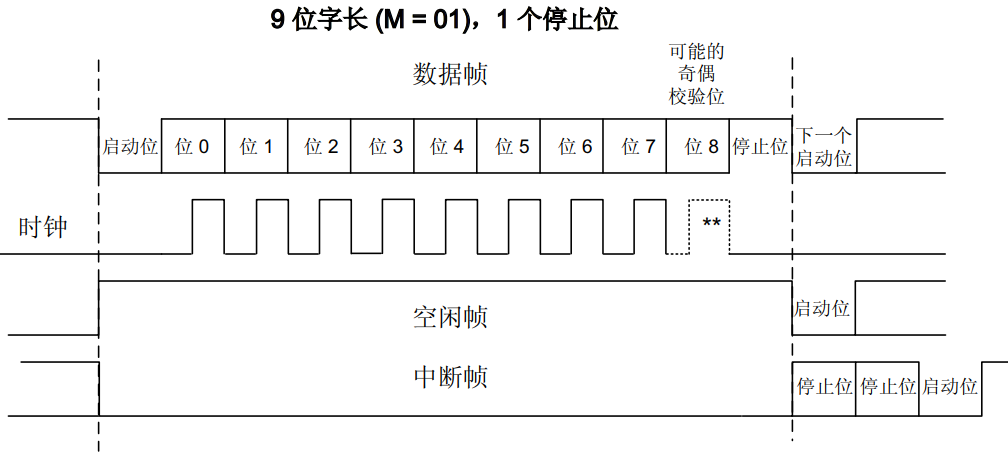
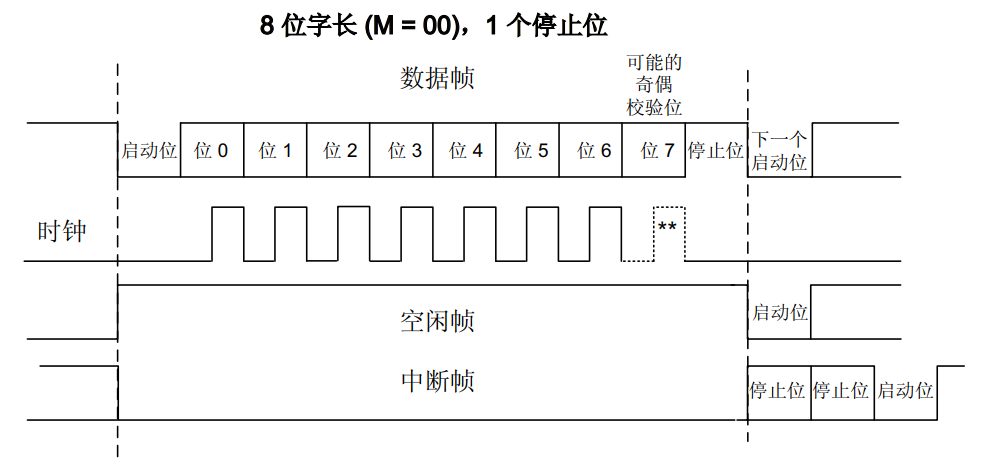
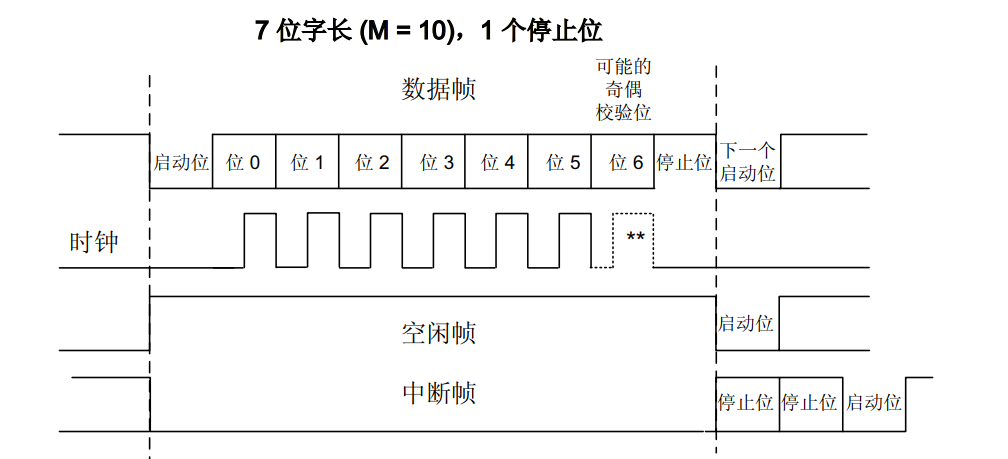
3、USART字符说明
- 可通过对USART_CR1寄存器中的M位(M0:位12,M1:位28)进行编程来将字长设置为7位、8位或9位。仅某些USART支持7位模式。此外,并非所有模式都在7位数据长度模式下受支持。
- 7位字符长度:M[1:0]=“10”
- 8位字符长度:M[1:0]=“00”
- 9位字符长度:M[1:0]=“01”
- 在默认情况下,信号(TX或RX)在起始位工作期间处于低电平状态。在停止位工作期间处于高电平状态。通过极性配置控制,可以单独针对每个信号对这些值取反。
- 空闲字符:可理解为整个帧周期内电平均为“1”(停止位的电平也是“1”)。
- 停止字符:可理解为在一个帧周期内接收到的电平均为“0”。发送器在中断帧的末尾插入2个停止位。
- 发送和接收操作由通用波特率发生器驱动。当发送器和接收器的使能位置1时,将分别生成发送时钟和接收时钟。
- 下面给出了各个块的详细说明:
- 本试验使用的芯片STM32F767IGT6,使用UART为USART_6,引脚位PC6和PC7,经过串口转USB芯片CH340转换后,可通过USB接口与计算机通讯。计算机安装 CH340 驱动后,可通过串口工具来接收串口发送的数据和向串口发送给数据。用串口工具打开iCore4对应的端口,波特率设为115200,发送相应的命令,便可以控制LED的亮灭情况。串口命令如下表:
| LED_RED_ON\r\n | LED红灯亮 |
| LED_RED_OFF\r\n | LED红灯灭 |
| LED_BLUE_ON\r\n | LED蓝灯亮 |
| LED_BLUE_OFF\r\n | LED蓝灯灭 |
| LED_GREEN_ON\r\n | LED绿灯亮 |
| LED_GREEN_OFF\r\n | LED绿灯灭 |
四、 实验程序
1、 主函数
int main(void) { int i; char buffer[20]; /* MCU 配置*/ /* 重置所有外围设备,初始化Flash接口和Systick */ HAL_Init(); /* 配置系统时钟 */ SystemClock_Config(); /* 初始化所有已配置的外围设备 */ MX_GPIO_Init(); MX_USART6_UART_Init(); usart6.initialize(9600); //串口波特设置 usart6.printf("Hello, I am iCore4!\r\n"); //串口信息输出 while (1) { if(usart6.receive_ok_flag){ //接受完成 usart6.receive_ok_flag = 0; for(i = 0;i < 20;i++){ buffer[i] = tolower(usart6.receive_buffer[i]); } //比较接受信息 if(memcmp(buffer,"led_red_on",strlen("led_red_on")) == 0){ LED_RED_ON; usart6.printf("ok!\r\n"); } if(memcmp(buffer,"led_red_off",strlen("led_red_off")) == 0){ LED_RED_OFF; usart6.printf("ok!\r\n"); } if(memcmp(buffer,"led_green_on",strlen("led_green_on")) == 0){ LED_GREEN_ON; usart6.printf("ok!\r\n"); } if(memcmp(buffer,"led_green_off",strlen("led_green_off")) == 0){ LED_GREEN_OFF; usart6.printf("ok!\r\n"); } if(memcmp(buffer,"led_blue_on",strlen("led_blue_on")) == 0){ LED_BLUE_ON; usart6.printf("ok!\r\n"); } if(memcmp(buffer,"led_blue_off",strlen("led_blue_off")) == 0){ LED_BLUE_OFF; usart6.printf("ok!\r\n"); } } } }
2、 UART结构体定义
UART_HandleTypeDef huart6;
- UART句柄结构定义,这个结构体中存放了UART所有用到的功能,后面的别名就是我们所用的uart串口的别名。
typedef struct __UART_HandleTypeDef { USART_TypeDef *Instance; //UART寄存器基地址 UART_InitTypeDef Init; //UART通讯参数 UART_AdvFeatureInitTypeDef AdvancedInit; //UART高级功能初始化参数 uint8_t * pTxBuffPtr; //指向UART Tx传输缓冲区的指针 uint16_t TxXferSize; //UART Tx传输大小 __IO uint16_t TxXferCount; //UART Tx传输计数器 uint8_t * pRxBuffPtr; //指向UART Rx传输缓冲区的指针 uint16_t RxXferSize; //UART Rx传输大小 __IO uint16_t RxXferCount; //UART Rx传输计数器 uint16_t Mask; // UART Rx RDR寄存器掩码 DMA_HandleTypeDef * hdmatx; //UART Tx DMA句柄参数 DMA_HandleTypeDef * hdmarx; //UART Rx DMA句柄参数 HAL_LockTypeDef Lock; //锁定对象 __IO HAL_UART_StateTypeDef gState; //与全局句柄管理有关的UART状态信息并且与Tx操作有关。 __IO HAL_UART_StateTypeDef RxState; //与Rx操作有关的UART状态信息 __IO uint32_t ErrorCode; //UART错误代码 } UART_HandleTypeDef;
3、 USART6初始化函数
void MX_USART6_UART_Init(void) { huart6.Instance = USART6; huart6.Init.BaudRate = 115200; //波特率 huart6.Init.WordLength = UART_WORDLENGTH_8B; //在一帧中发送或接收的数据位数 huart6.Init.StopBits = UART_STOPBITS_1;//停止位 huart6.Init.Parity = UART_PARITY_NONE;//校验位 huart6.Init.Mode = UART_MODE_TX_RX;//发送接收模式 huart6.Init.HwFlowCtl = UART_HWCONTROL_NONE;//硬件流控制模式 huart6.Init.OverSampling = UART_OVERSAMPLING_16; huart6.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE; huart6.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; if (HAL_UART_Init(&huart6) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } }
4、 串口发送/接收函数
- HAL_UART_Transmit();串口发送数据,使用超时管理机制
- HAL_UART_Receive();串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT();串口中断模式发送
- HAL_UART_Receive_IT();串口中断模式接收
- HAL_UART_Transmit_DMA();串口DMA模式发送
- HAL_UART_Transmit_DMA();串口DMA模式接收
- 串口发送数据
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
- 功能:串口发送指定长度的数据。如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT)。
- 参数:
- UART_HandleTypeDef*huart UATR的别名 如: UART_HandleTypeDef huart6;别名就是huart6
- *pData 需要发送的数据
- Size 发送的字节数
- Timeout 最大发送时间,发送数据超过该时间退出发送
- 中断接收数据:
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
- 功能:串口中断接收,以中断方式接收指定长度数据。
- 大致过程:设置数据存放位置,接收数据长度,然后使能串口接收中断。接收到数据时,会触发串口中断。之后,串口中断函数处理,直到接收到指定长度数据,而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
- 参数:
- UART_HandleTypeDef *huart UATR的别名
- *pData 接收到的数据存放地址
- Size 接收的字节数
5、 串口中断函数
HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数 HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //串口发送中断回调函数 HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart); //串口发送一半中断回调函数(用的较少) HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //串口接收中断回调函数 HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart); //串口接收一半回调函数(用的较少) HAL_UART_ErrorCallback(); //串口接收错误函数
- 串口接收中断回调函数
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
- 功能:HAL库的中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码,串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改。
- 参数:
- UART_HandleTypeDef *huart UATR的别名
- 串口中断处理函数
HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
- 功能:对接收到的数据进行判断和处理 判断是发送中断还是接收中断,然后进行数据的发送和接收,在中断服务函数中使用
- 串口查询函数
HAL_UART_GetState(); //判断UART的接收是否结束,或者发送数据是否忙碌
五、 实验步骤
- 把仿真器与iCore4的SWD调试口相连(直接相连或者通过转接器相连);
- 把iCore4通过Micro USB线与计算机相连,为iCore4供电;
- 打开Keil MDK 开发环境,并打开本实验工程;
- 烧写程序到iCore4上;
- 也可以进入Debug 模式,单步运行或设置断点验证程序逻辑。
六、 实验现象
- 通过串口输入相应的命令,可以控制LED的亮灭。

usart通信实验_通过命令控制led.txt · 最后更改: 2022/03/22 10:17 由 sean
除额外注明的地方外,本维基上的内容按下列许可协议发布: 豫ICP备18022004号-1
