
arm驱动三色led
目录
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-07-03 | gingko | 初次建立 |
实验一:GPIO输出实验——ARM驱动三色LED
一、 实验目的与意义
- 了解STM32 GPIO结构。
- 了解STM32 GPIO 特征。
- 了解三色LED特征和应用领域。
- 掌握STM32 HAL库中GPIO属性的配置方法。
- 掌握KEILMDK 集成开发环境使用方法。
二、 实验设备及平台
三、 实验原理
1、STM32F7 IO简介
- STM32F7每组通用I/O端口包括4个32位配置寄存器(MODER、OTYPER、OSPEEDR和PUPDR)、2个32位数据寄存器(IDR和ODR)、1个32位置位/复位寄存器(BSRR)、1个32位锁定寄存器(LCKR)和2个32位复用功能选择寄存器(AFRH和AFRL)等。这样,STM32F7每组IO有10个32位寄存器控制,其中常用的有4个配置寄存器+2个数据寄存器+2个复用功能选择寄存器,共8个。
2、GPIO输入输出模式
GPIO可以配置成以下8种工作模式:
- 浮空输入:此端口在默认情况下什么都不接,呈高阻态,这种设置在数据传输时用的比较多。
- 上拉输入:上拉输入模式与浮空输入模式相比,仅仅是在数据通道上部,接入了一个上拉电阻,这个上拉电阻的阻值介于30K~50K欧姆,CPU可以随时在输入数据寄存器的另一端,读出I/O端口的电平状态。这种模式的好处在于我们什么都不输入时,由于内部上拉电阻的原因,处理器会觉得我们输入了高电平,这就避免了不确定的输入。该端口在默认情况下输入为高电平。
- 下拉输入:下拉输入模式与浮空输入模式相比,仅仅是在数据通道上部,接入了一个下拉电阻。与上拉输入模式类似,这种模式的好处在于外部没有输入时,由于内部下拉电阻的原因,我们的处理器会觉得我们输入了低电平。
- 模拟功能:STM32的模拟输入通道的配置很简单,信号从I/O端口直接进入ADC模块。此时,所有的上拉、下拉电阻和施密特触发器,均处于断开状态,因此输入数据寄存器将不能反映端口上的电平状态,也就是说,模拟输入配置下,信号不经过输入数据寄存器,CPU不能在输入数据寄存器上读到有效的数据。该输入模式,使我们可以获得外部的模拟信号。
- 开漏输出:开漏输出不可以直接输出高电平,开漏输出的输出端相当于三极管的集电极,要得到高电平状态需要上拉电阻才行。
- 推挽输出:推挽输出可以输出高、低电平,连接数字器件;推挽结构一般是指两个三极管分别受两个互补信号的控制,总是在一个三极管导通的时候另一个截止。高低电平由IC的电源决定。
- 开漏复用输出:GPIO的基本功能是普通的I/O,而STM32有自己的各个功能模块,这些内置外设的外部引脚是与标准GPIO复用的,当作为这些模块的功能引脚时就叫复用。开漏复用输出功能模式与开漏输出模式相比,不同的是输出控制电路的输入,是和片上外设的输出信号相连即与复用功能的输出端相连,此时,输出数据寄存器在输出通道被断开。
- 推挽复用输出:推挽复用输出功能模式与推挽输出模式相比,不同的是输出控制电路的输入,是和片上外设的输出信号相连,即与复用功能的输出端相连,而输出数据寄存器在输出通道被断开。
3、GPIO口配置
- 1 作为普通GPIO输入:
- 根据需要配置该引脚为浮空输入、带弱上拉输入或带弱下拉输入,同时不要使能该引脚对应的所有复用功能模块。
- 2 作为普通GPIO输出:
- 根据需要配置该引脚为推挽输出或开漏输出,同时不要使能该引脚对应的所有复用功能模块。
- 3 作为普通模拟输入:
- 配置该引脚为模拟输入模式,同时不要使能该引脚对应的所有复用功能模块。
- 4 作为内置外设的输入:
- 根据需要配置该引脚为浮空输入、带弱上拉输入或带弱下拉输入,同时使能该引脚对应的某个复用功能模块。
- 5 作为内置外设的输出:
- 根据需要配置该引脚为复用推挽输出或复用开漏输出,同时使能该引脚对应的所有复用功能模块。
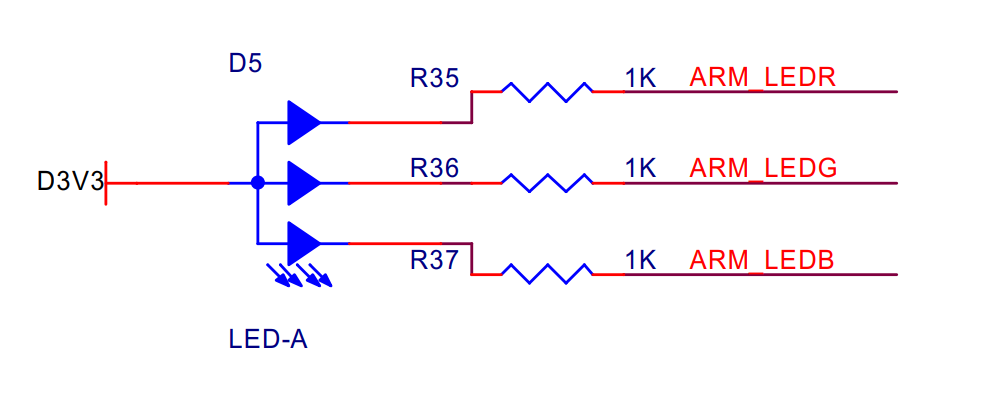
- 本实验通过STM32的三个GPIO驱动一个三色LED,引脚PB2接红色LED(ARM_LEDR),引脚PA9接蓝色LED(ARM_LEDB),引脚PA10接绿色LED(ARM_LEDG), GPIO为推挽输出模式,采用灌电流方式与LED连接,通过拉高拉低GPIO电平,从而控制LED亮灭。原理图如下图所示。
四、 实验程序
1、主函数
int main(void) { /* MCU配置*/ /* 重置所有外围设备,初始化Flash接口和Systick */ HAL_Init(); /* 配置系统时钟 */ SystemClock_Config(); /* 初始化所有已配置的外围设备 */ MX_GPIO_Init(); /* 无限循环 */ while (1) { //三色LED循环闪烁 LED_RED_ON; LED_BLUE_OFF; LED_GREEN_OFF; HAL_Delay(500); LED_RED_OFF; LED_BLUE_ON; LED_GREEN_OFF; HAL_Delay(500); LED_RED_OFF; LED_BLUE_OFF; LED_GREEN_ON; HAL_Delay(500); } }
2、GPIO初始化
void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO端口时钟使能 */ __HAL_RCC_GPIOH_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*配置GPIO引脚输出电平 */ HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET); /*配置GPIO引脚输出电平*/ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9|GPIO_PIN_10, GPIO_PIN_SET); /*配置GPIO引脚:PB2 */ GPIO_InitStruct.Pin = GPIO_PIN_2; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); /*配置GPIO引脚:PA9 PA10 */ GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } void HAL_GPIO_Init(GPIO_TypeDef*GPIOx, GPIO_InitTypeDef *GPIO_Init)
- 这个函数两个参数,第一个参数是用来指定需要初始化的GPIO对应的GPIO组,取值范围为GPIOA~GPIOK。第二个参数为初始化参数结构体指针,结构体类型为GPIO_InitTypeDef。
typedef struct { uint32_t Pin; // 配置IO端口 uint32_t Mode; // 配置IO模式 uint32_t Pull; // 配置IO上下拉 uint32_t Speed; // 配置IO速度等级 uint32_t Alternate; // 要连接到所选引脚的外围设备 }GPIO_InitTypeDef;
3、GPIO写入电平函数
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState) { /* 检查参数 */ assert_param(IS_GPIO_PIN(GPIO_Pin)); assert_param(IS_GPIO_PIN_ACTION(PinState)); if(PinState != GPIO_PIN_RESET) { GPIOx->BSRR = GPIO_Pin; } else { GPIOx->BSRR = (uint32_t)GPIO_Pin << 16; } }
- 实验中通过调用HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)函数来实现对GPIO引脚高低电平的写入。
4、宏定义引脚
#define LED_RED_ON HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2,GPIO_PIN_RESET) #define LED_RED_OFF HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2,GPIO_PIN_SET) #define LED_BLUE_ON HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9,GPIO_PIN_RESET) #define LED_BLUE_OFF HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9,GPIO_PIN_SET) #define LED_GREEN_ON HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10,GPIO_PIN_RESET) #define LED_GREEN_OFF HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10,GPIO_PIN_SET)
- 定义好上面的宏定义之后,就可以直接通过直接操作宏定义来控制三色LED的状态。
五、 实验步骤
- 把仿真器与iCore4的SWD调试口相连(直接相连或者通过转接器相连);
- 把iCore4通过Micro USB线与计算机相连,为iCore4供电;
- 打开Keil MDK 开发环境,并打开本实验工程;
- 烧写程序到iCore4上;
- 也可以进入Debug 模式,单步运行或设置断电运行观察三色LED状态。
六、 实验现象
- 该实验实现跑马灯功能,红、绿、蓝三色LED每隔500ms循环点亮。
arm驱动三色led.txt · 最后更改: 2022/03/22 10:16 由 sean
除额外注明的地方外,本维基上的内容按下列许可协议发布: 豫ICP备18022004号-1
