
icore3_arm_hal_7
目录
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-04-11 | gingko | 初次建立 |
STM32CubeMX教程七——IWDG看门狗实验
1. 新建工程:在主界面选择File–>New Project 或者直接点击ACCEE TO MCU SELECTOR
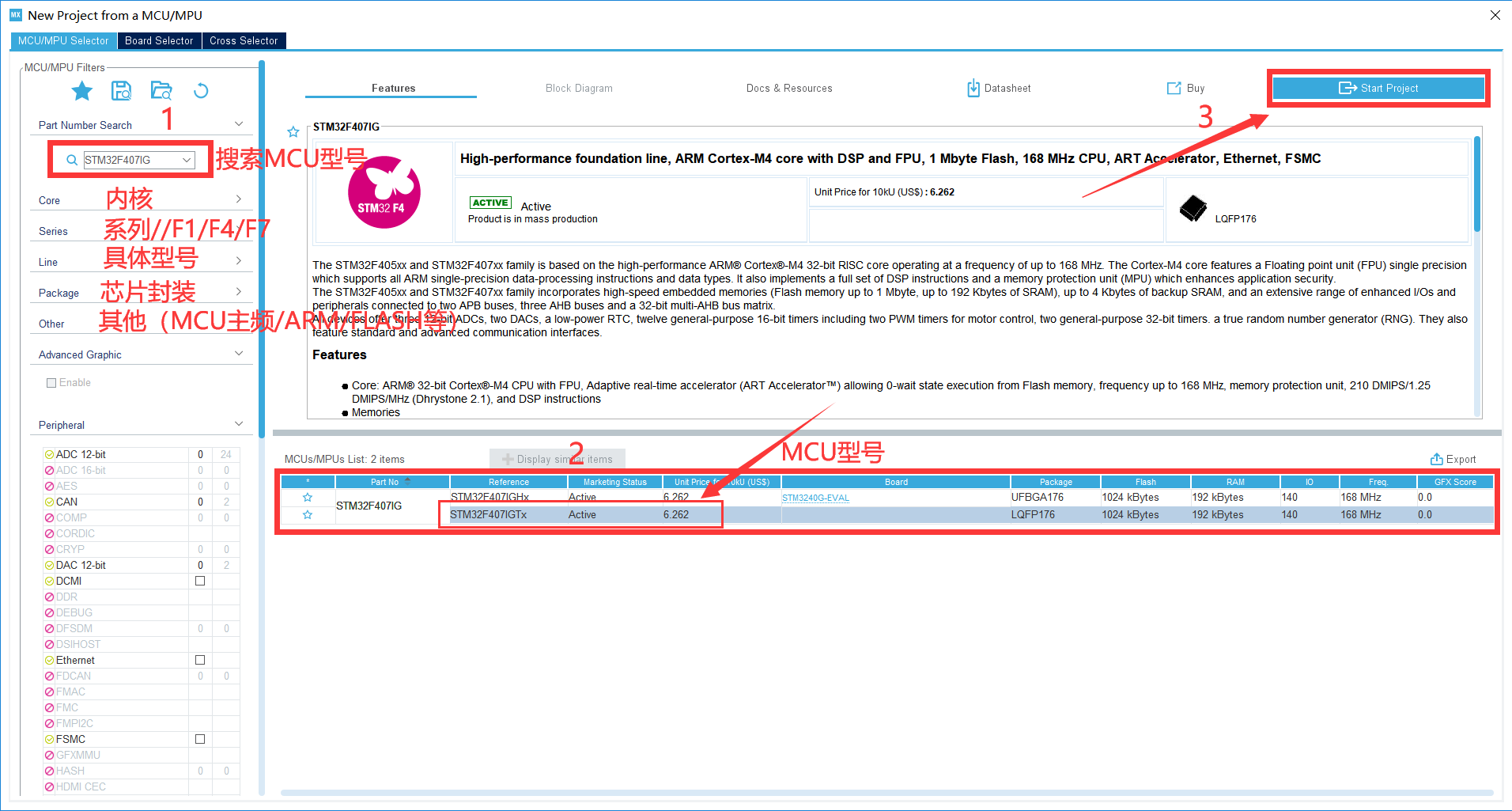
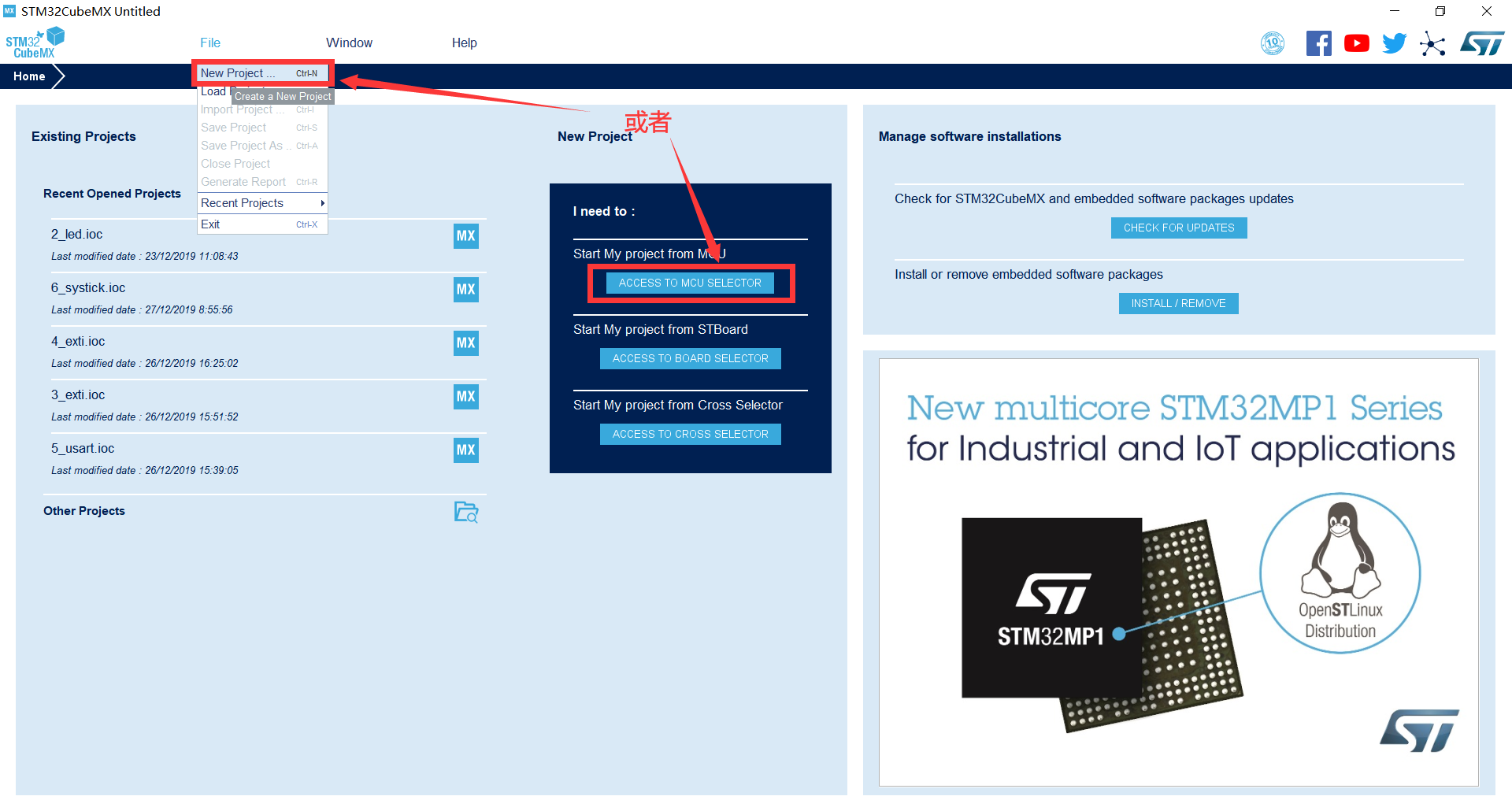 2. 出现芯片型号选择,搜索自己芯片的型号,双击型号,或者点击Start Project进入配置
在搜索栏的下面,提供的各种查找方式,可以选择芯片内核、型号等等,可以帮助你查找芯片。本实验选取的芯片型号为:STM32F407IGTx。
2. 出现芯片型号选择,搜索自己芯片的型号,双击型号,或者点击Start Project进入配置
在搜索栏的下面,提供的各种查找方式,可以选择芯片内核、型号等等,可以帮助你查找芯片。本实验选取的芯片型号为:STM32F407IGTx。
3. 配置RCC,使用外部时钟源
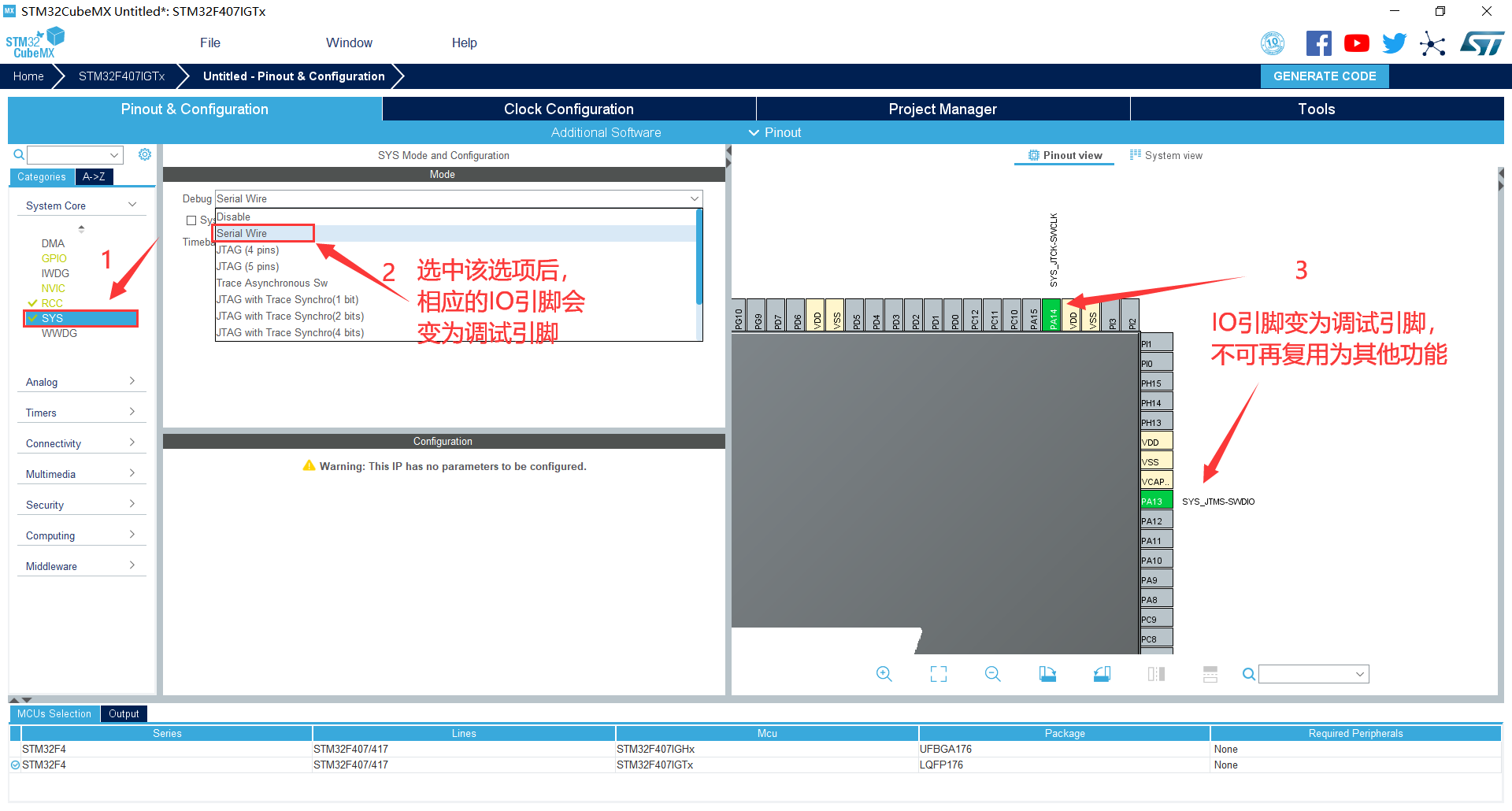
 4. 配置调试引脚
4. 配置调试引脚
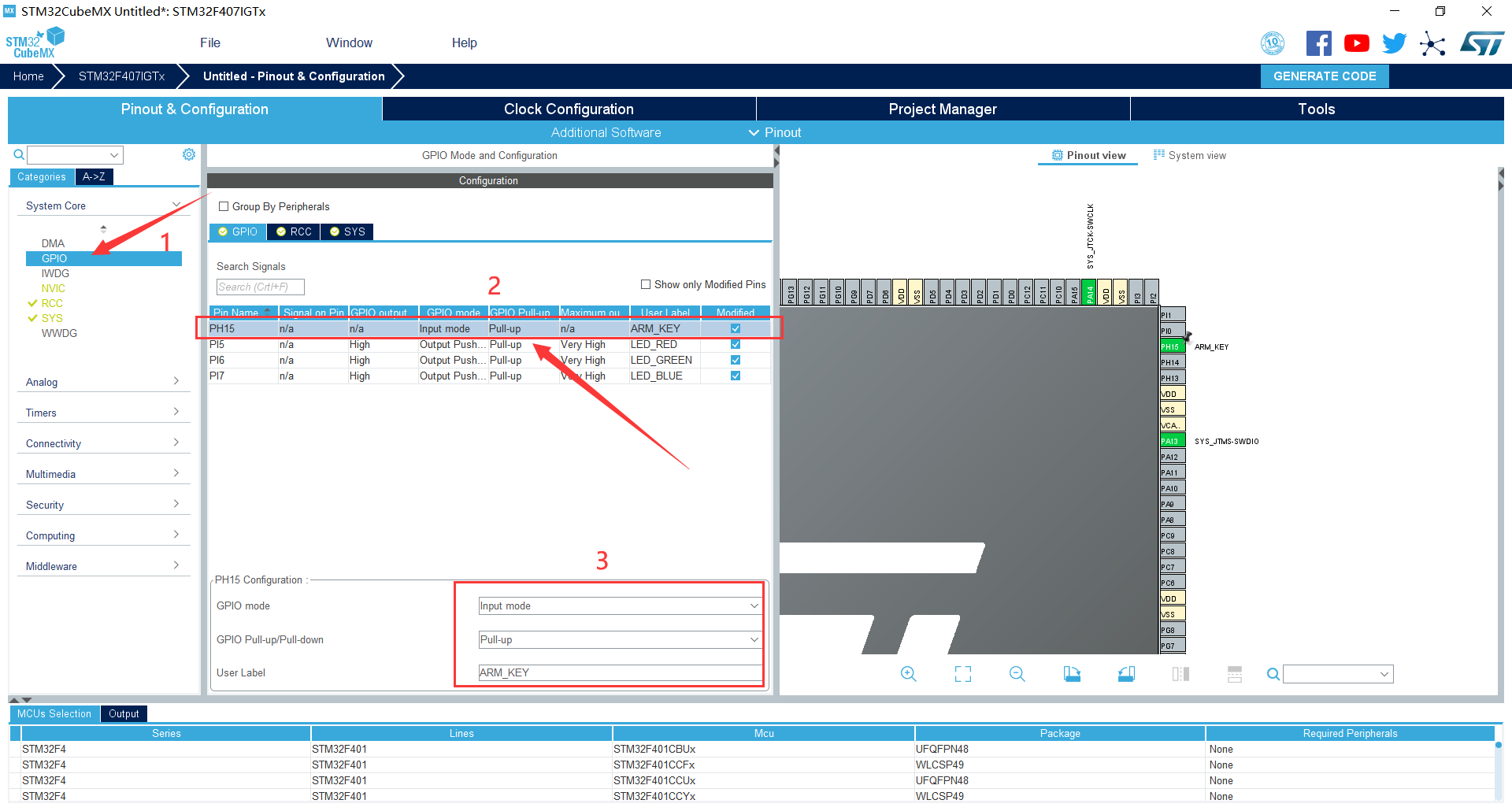
 5. 将LED对应的3个引脚(PI5,PI6,PI7)设置为GPIO_Output
5. 将LED对应的3个引脚(PI5,PI6,PI7)设置为GPIO_Output
 6. 将ARM_KEY对应的引脚(PH15)设置为GPIO_EXTI15
6. 将ARM_KEY对应的引脚(PH15)设置为GPIO_EXTI15
 7. 引脚模式配置
7. 引脚模式配置
- 三色LED引脚配置

- ARM_KEY引脚配置,GPIO_EXIT有6种模式,这里选择下降沿触发外部中断。
 8. 配置IWDG
8. 配置IWDG
 9. 时钟源设置,选择外部高速时钟源,配置为最大主频
9. 时钟源设置,选择外部高速时钟源,配置为最大主频
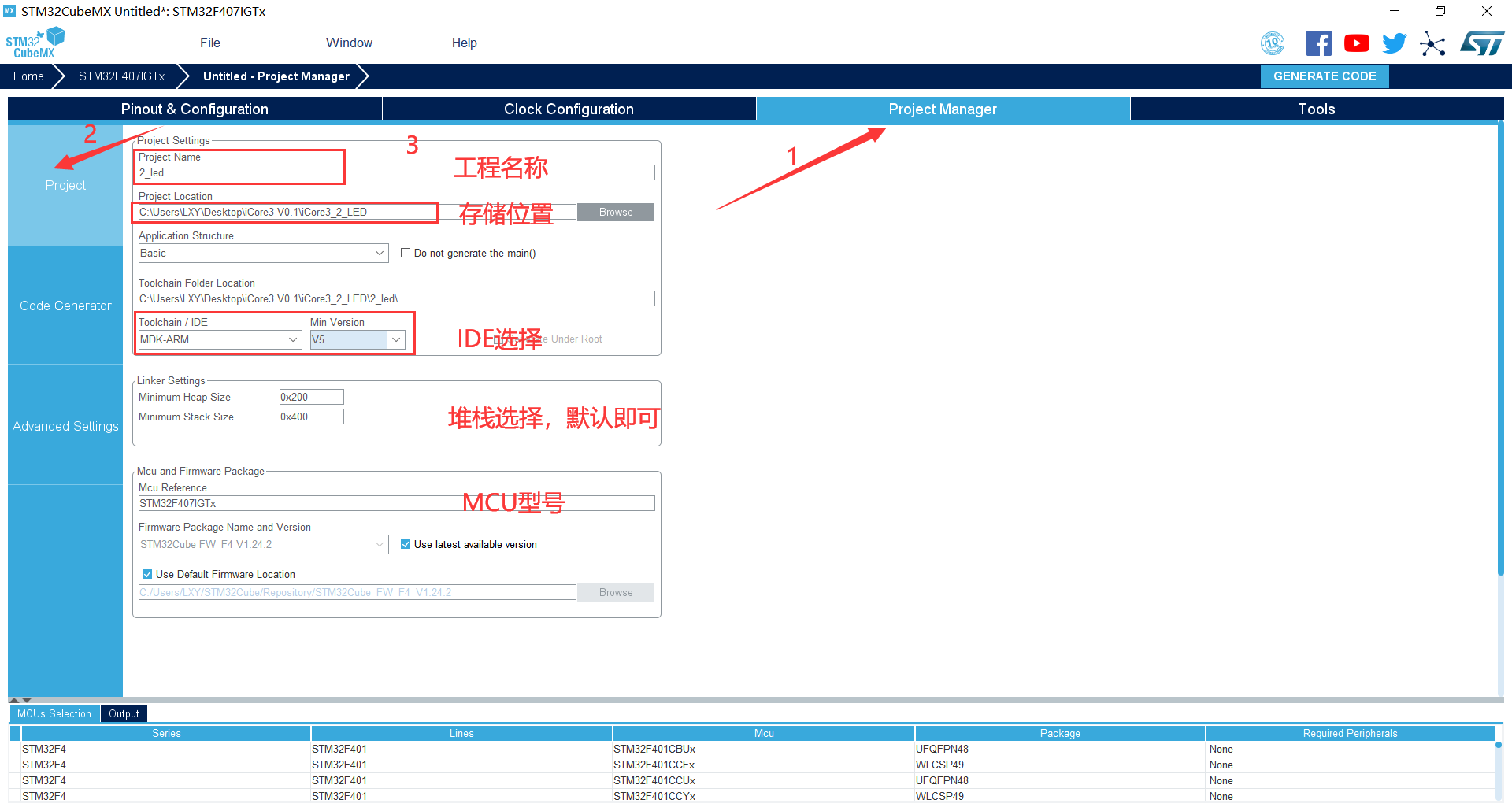
 10. 工程文件的设置, 这里就是工程的各种配置 我们只用到有限几个,其他的默认即可 IDE我们使用的是 MDK5
10. 工程文件的设置, 这里就是工程的各种配置 我们只用到有限几个,其他的默认即可 IDE我们使用的是 MDK5
 11. 点击Code Generator,进行进一步配置
11. 点击Code Generator,进行进一步配置

- Copy all used libraries into the project folder
- 将HAL库的所有.C和.H都复制到所建工程中
- 优点:这样如果后续需要新增其他外设又可能不再用STM32CubeMX的时候便会很方便
- 缺点:体积大,编译时间很长
- Copy only the necessary library files
- 只复制所需要的.C和.H(推荐)
- 优点:体积相对小,编译时间短,并且工程可复制拷贝
- 缺点:新增外设时需要重新用STM32CubeMX导入
- Add necessary library files as reference in the toolchain project configuration file
- 不复制文件,直接从软件包存放位置导入.C和.H
- 优点:体积小,比较节约硬盘空间
- 缺点:复制到其他电脑上或者软件包位置改变,就需要修改相对应的路径
自行选择方式即可
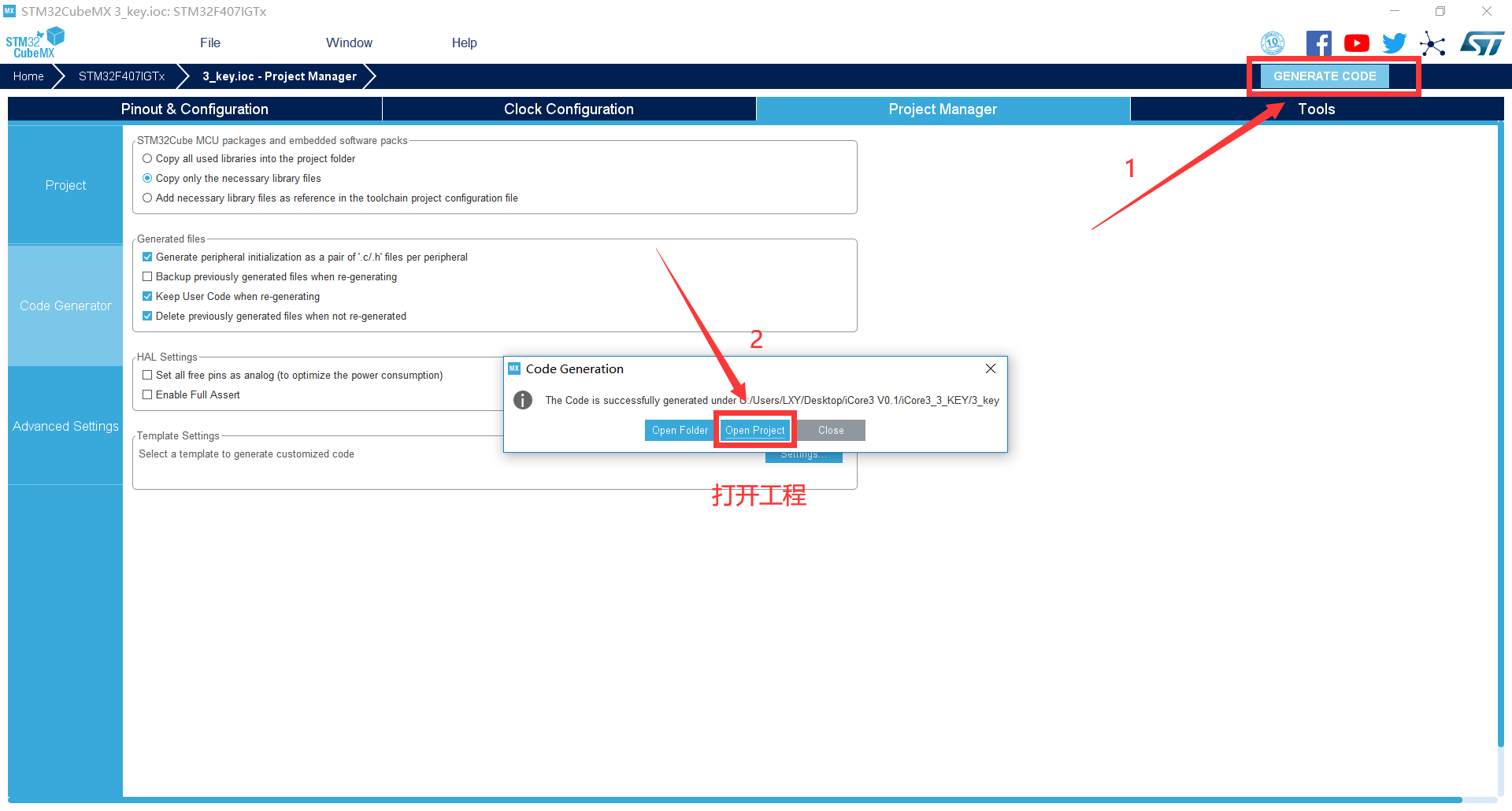
12. 然后点击GENERATE CODE 创建工程。创建成功,打开工程。
实验七:IWDG看门狗实验——复位ARM
一、 实验目的与意义
- 了解STM32 IWDG结构
- 了解STM32 IWDG特征
- 掌握IWDG的使用方法
- 掌握STM32 HAL库中IWDG属性的配置方法
- 掌握KEIL MDK 集成开发环境使用方法
二、 实验设备及平台
三、 实验原理
1、看门狗简介
- 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界磁场的干扰,造成各种寄存器和内存的数据混乱,会导致程序指针错误,不在程序区,取出错误的程序指令等,都会陷入死循环。程序的正常运行被打断,由单片机控制的系统无法继续正常工作,会造成整个系统陷入停滞状态,发生不可预料的后果。看门狗就是定期的查看芯片内部的情况,一旦发生错误就向芯片发出重启的电路。看门狗命令在程序的中断中拥有最高的优先级。
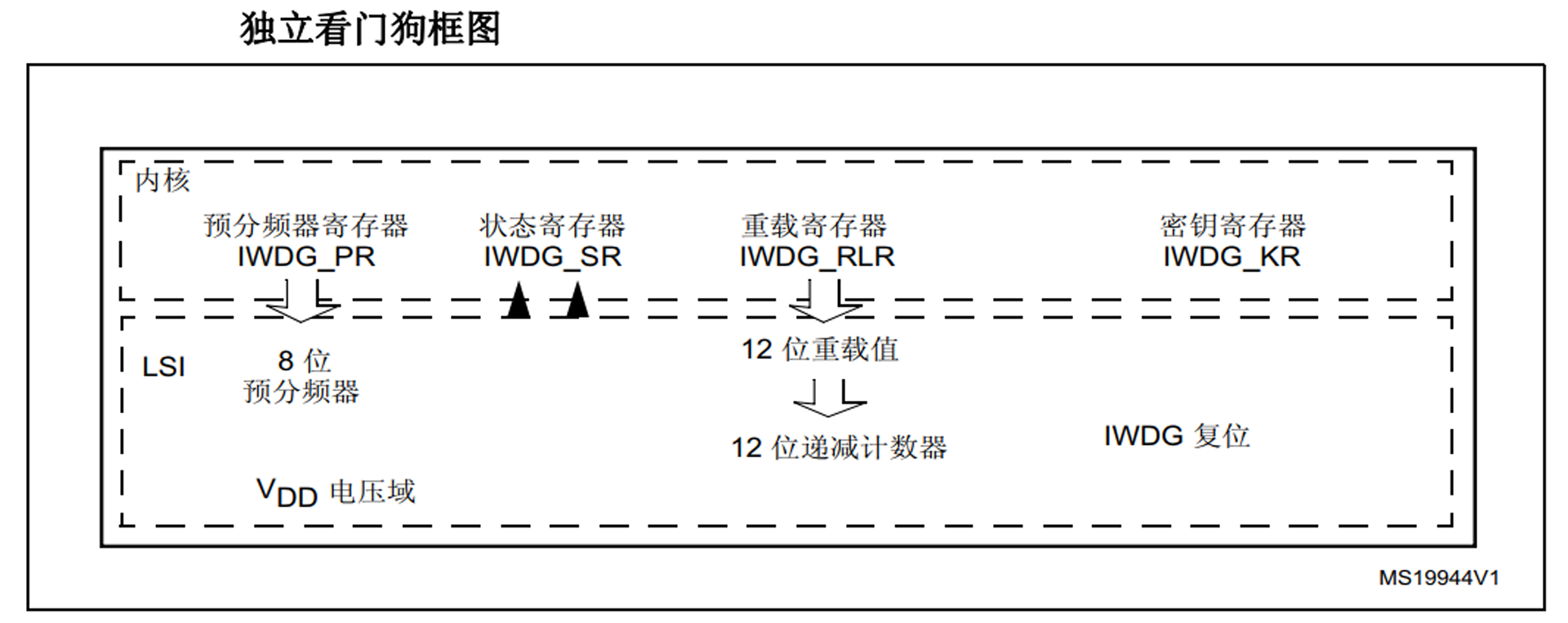
2、IWDG简介
- 此器件具有两个嵌入式看门狗外设,具有安全性高、定时准确及使用灵活的优点。两个看门狗外设(独立和窗口)均可用于检测并解决由软件错误导致的故障;当计数器达到给定的超时值时,触发一个中断(仅适用于窗口型看门狗)或产生系统复位。
- 独立看门狗(IWDG)由其专用低速时钟(LSI)驱动,因此即便在主时钟发生故障时仍然保持工作状态。窗口看门狗(WWDG)时钟由APB1时钟经预分频后提供,通过可配置的时间窗口来检测应用程序非正常的过迟或过早的操作。IWDG最适合应用于那些需要看门狗作为一个在主程序之外,能够安全独立工作,并且对时间精度要求较低的场合。WWDG最适合那些要求看门狗在精度计时窗口起作用的应用程序。
3、IWDG主要特性
- (1) 自由运行递减计数器。
- (2) 时钟由独立RC振荡器提供(可在待机和停止模式下运行)。
- (3) 当递减计数器值达到0x000时产生复位(如果看门狗已激活)。

- STM32内部包含独立看门狗,通过看门狗可以监控程序运行,程序运行错误时,未在规定时间喂狗,自动复位ARM。本实验通过按键按下,停止喂狗,制造程序运行错误,从而产生复位。
四、 实验程序
1. 主函数
int main(void) { HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_IWDG_Init(); while (1) { while(ARM_KEY_STATE == KEY_DOWN); //按键按下进入循环,不再喂狗,2秒后灯熄灭 HAL_IWDG_Refresh(&hiwdg); //喂狗 LED_RED_ON; LED_GREEN_OFF; LED_BLUE_OFF; HAL_Delay(500); LED_RED_OFF; LED_GREEN_ON; LED_BLUE_OFF; HAL_Delay(500); LED_RED_OFF; LED_GREEN_OFF; LED_BLUE_ON; HAL_Delay(500); } }
2.HAL库独立看门狗函数库
- 看门狗初始化函数:
HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg)
- 喂狗函数:
HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
- 功能:使用该函数定时喂狗
五、 实验步骤
- 把仿真器与iCore3的SWD调试口相连(直接相连或者通过转接器相连);
- 把iCore3通过Micro USB线与计算机相连,为iCore3供电;
- 打开Keil MDK 开发环境,并打开本实验工程;
- 烧写程序到iCore3上;
- 也可以进入Debug 模式,单步运行或设置断点验证程序逻辑。
六、 实验现象
- iCore3双核心板三色LED交替闪烁,当按键按下超过2s,看门狗复位ARM。
icore3_arm_hal_7.txt · 最后更改: 2022/03/18 15:02 由 sean
除额外注明的地方外,本维基上的内容按下列许可协议发布: 豫ICP备18022004号-1
