
icore4t_53
目录
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-03-26 | gingko | 初次建立 |
STM32CubeMX教程五十三——RS_232通信实验
1.在主界面选择File–>New Project 或者直接点击ACCEE TO MCU SELECTOR
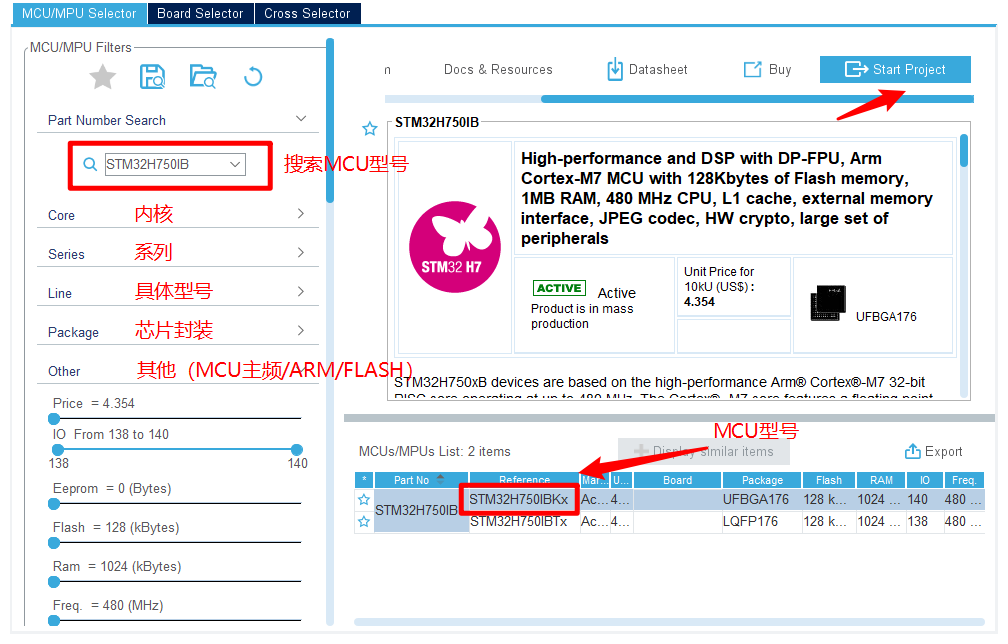
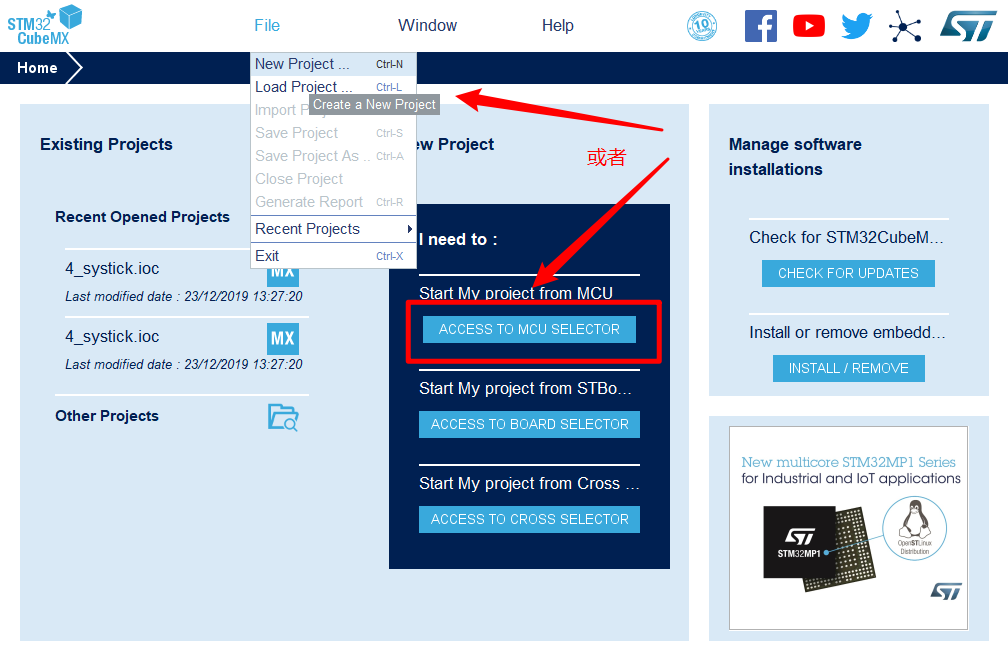 2.出现芯片型号选择,搜索自己芯片的型号,双击型号,或者点击Start Project进入配置
在搜索栏的下面,提供的各 种查找方式,可以选择芯片内核,型号,等等,可以帮助你查找芯片。本实验选取的芯片型号为:STM32H750IBKx。
2.出现芯片型号选择,搜索自己芯片的型号,双击型号,或者点击Start Project进入配置
在搜索栏的下面,提供的各 种查找方式,可以选择芯片内核,型号,等等,可以帮助你查找芯片。本实验选取的芯片型号为:STM32H750IBKx。
 3.配置RCC,使用外部时钟源
3.配置RCC,使用外部时钟源
 4.时基源选择SysTick
4.时基源选择SysTick
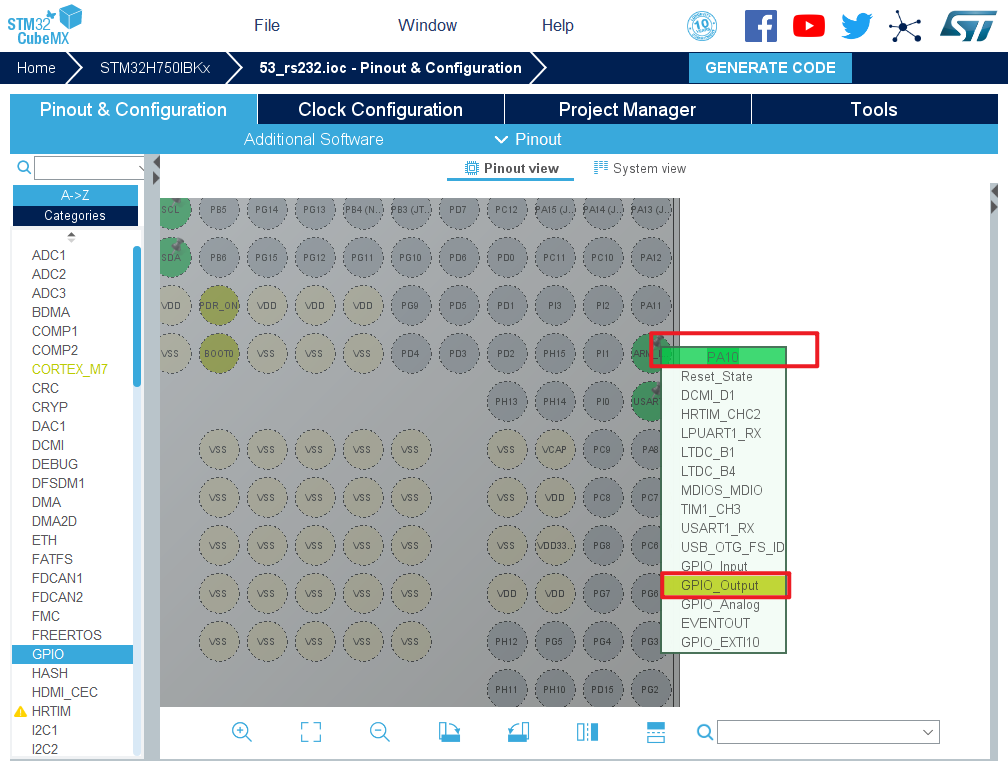
 5.将PA10,PB7,PB8设置为GPIO_Output
5.将PA10,PB7,PB8设置为GPIO_Output
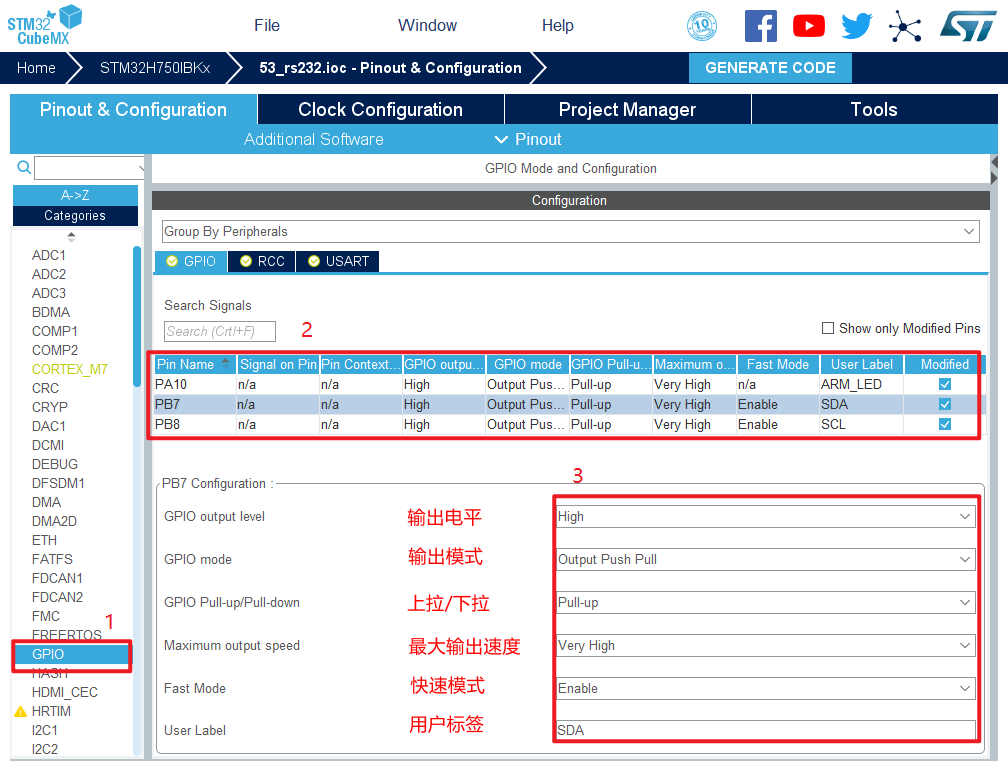
 6.引脚模式配置
6.引脚模式配置
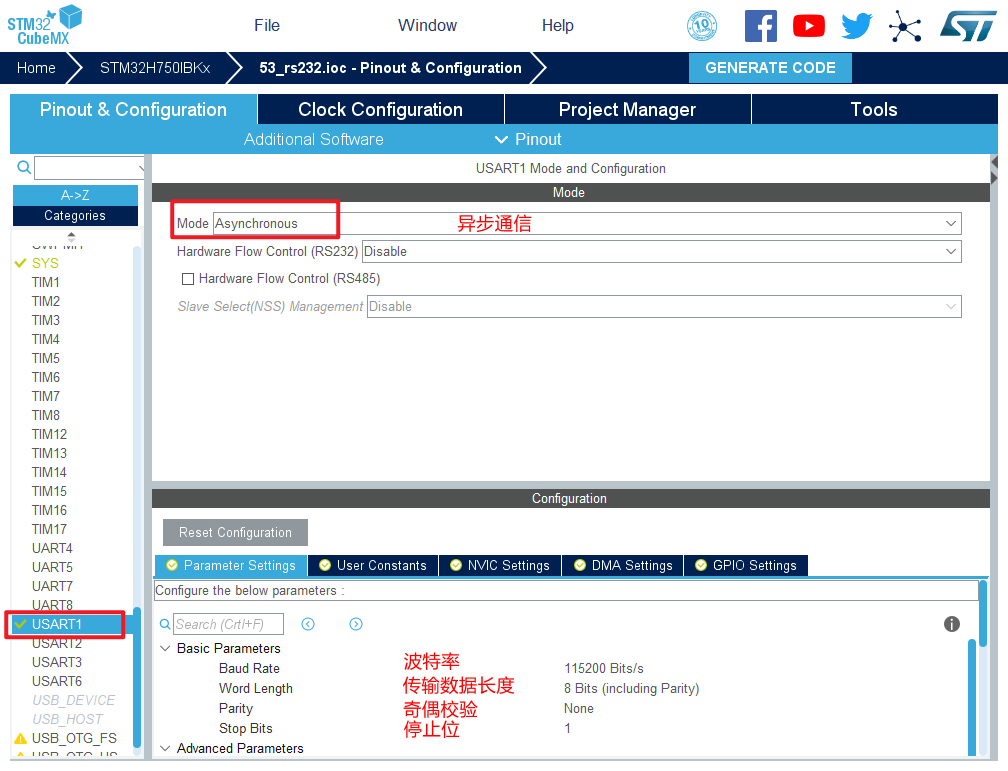
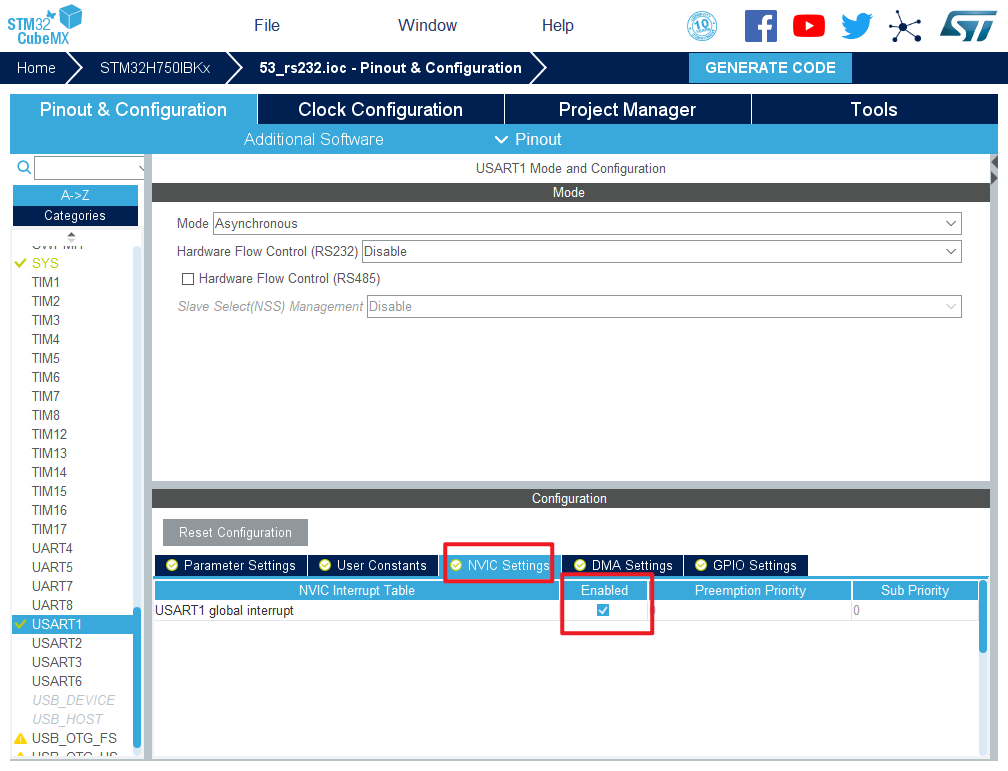
 7.配置串口
7.配置串口
 在NVIC Settings一栏使能接收中断
在NVIC Settings一栏使能接收中断
 引脚配置
引脚配置
 8.时钟源设置,选择外部高速时钟源,配置为最大主频
8.时钟源设置,选择外部高速时钟源,配置为最大主频
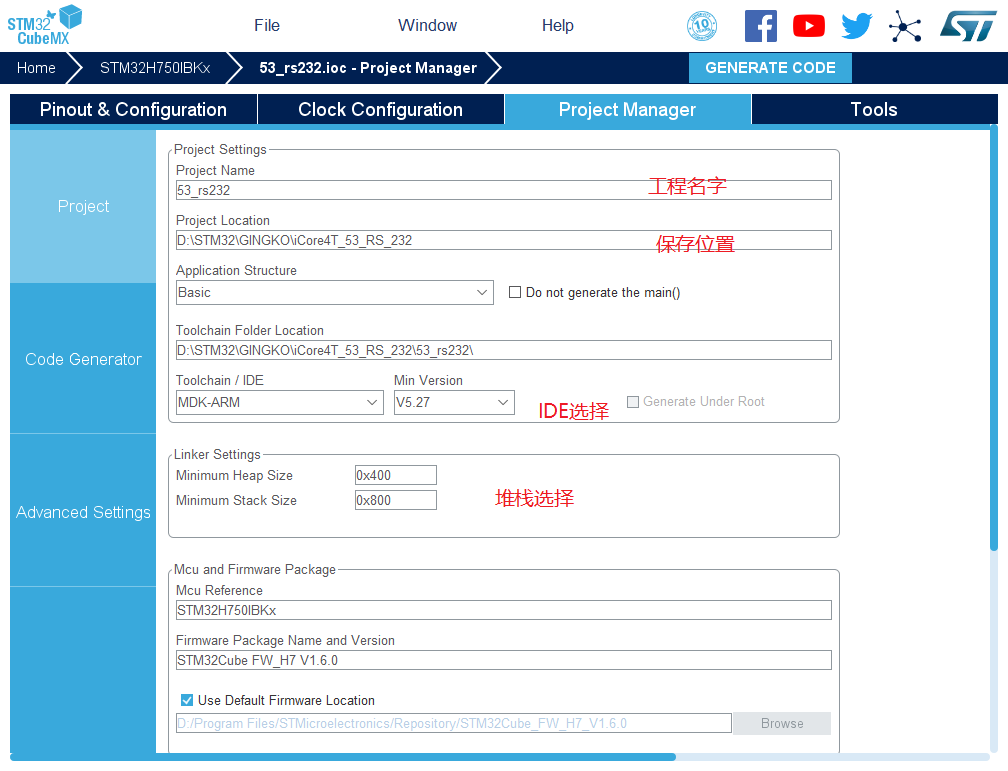
 9.工程文件的设置, 这里就是工程的各种配置 我们只用到有限几个,其他的默认即可 IDE我们使用的是 MDK V5.27
9.工程文件的设置, 这里就是工程的各种配置 我们只用到有限几个,其他的默认即可 IDE我们使用的是 MDK V5.27
 10.点击Code Generator,进行进一步配置
10.点击Code Generator,进行进一步配置
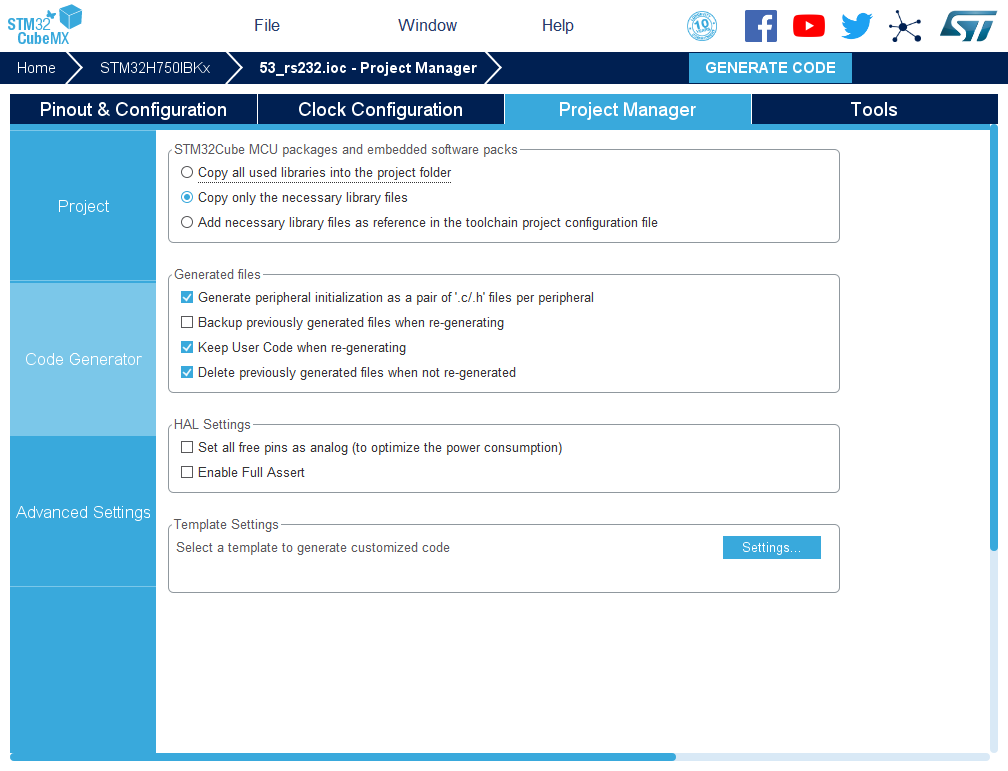
- Copy all used libraries into the project folder
- 将HAL库的所有.C和.H都复制到所建工程中
- 优点:这样如果后续需要新增其他外设又可能不再用STM32CubeMX的时候便会很方便
- 缺点:体积大,编译时间很长
- Copy only the necessary library files
- 只复制所需要的.C和.H(推荐)
- 优点:体积相对小,编译时间短,并且工程可复制拷贝
- 缺点:新增外设时需要重新用STM32CubeMX导入
- Add necessary library files as reference in the toolchain project configuration file
- 不复制文件,直接从软件包存放位置导入.C和.H
- 优点:体积小,比较节约硬盘空间
- 缺点:复制到其他电脑上或者软件包位置改变,就需要修改相对应的路径
- 自行选择方式即可
- Generate peripheral initialization as a pair of ‘.c/.h’ files per peripheral
- 每个外设生成单独的.c和.h文件
- Backup previously genareated files when re-generating
- 重新生成时备份以前产生的文件
- Keep User Code when re-generating
- 重新生成时保留用户代码
- Delete previously generated files when not re-generated
- 重新生成时删除以前生成的文件
- Set all free pins as analog (to optimize the power consumption)
- 没用到的引脚设置为模拟状态
11.然后点击GENERATE CODE 创建工程
 创建成功,打开工程。
创建成功,打开工程。
实验五十三:RS_232通信实验——通过命令控制LED
一、 实验目的与意义
- 了解STM32的UART结构。
- 了解STM32的UART特征。
- 掌握STM32的UART的使用方法。
- 掌握RS-232的使用方法。
- 掌握KEIL MDK 集成开发环境使用方法。
二、 实验设备及平台
三、 实验原理
串口通讯协议简介
- 串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,大部分电子设备都支持该通讯方式,电子工程师在调试设备时也经常使用该通讯方式输出调试信息。
- 在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设;对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
- 下面我们分别对串口通讯协议的物理层及协议层进行讲解。
1、物理层:
- 串口通讯的物理层有很多标准及变种,我们主要讲解 RS-232 标准,RS-232 标准主要规定了信号的用途、通讯接口以及信号的电平标准。
- 使用 RS-232 标准的串口设备间常见的通讯结构见下图。
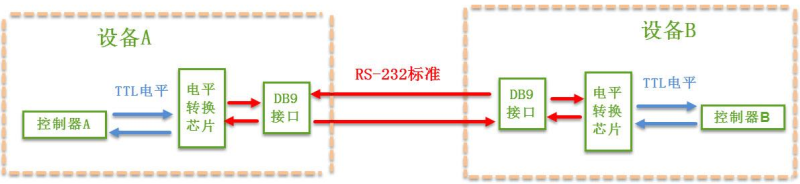
- 在上面的通讯方式中,两个通讯设备的“DB9 接口”之间通过串口信号线建立起连接,串口信号线中使用“RS-232 标准”传输数据信号。由于 RS-232 电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL 校准”的电平信号,才能实现通讯。
- 电平标准:
- 根据通讯使用的电平标准不同,串口通讯可分为 TTL 标准及 RS-232 标准。
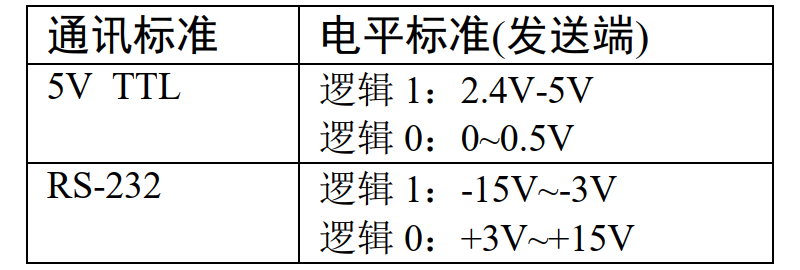
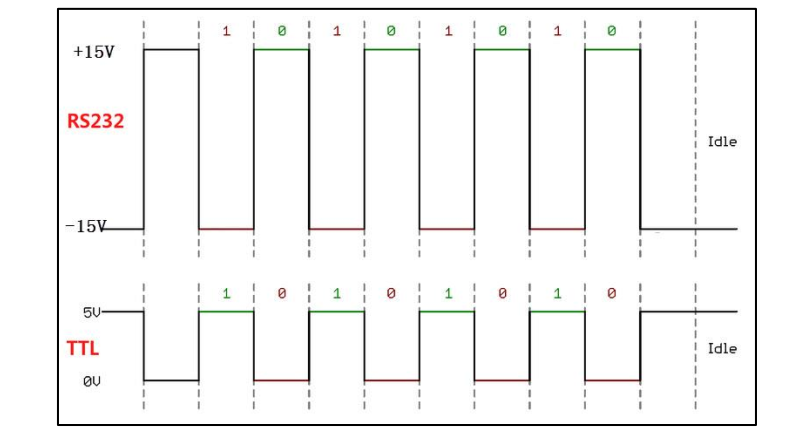
- 我们知道常见的电子电路中常使用TTL的电平标准,理想状态下,使用5V表示二进制逻辑1,使用0V表示逻辑0;而为了增加串口通讯的远距离传输及抗干扰能力,它使用-15V表示逻辑1,+15V表示逻辑0。使用RS232与TTL电平校准表示同一个信号时的对比见下图。
- 因为控制器一般使用 TTL 电平标准,所以常常会使用 SP3232 芯片对 TTL 及 RS-232电平的信号进行互相转换。
- RS-232介绍:
- RS-232是美国电子工业联盟制定的串行数据通信接口标准,原始编号全称是EIA-RS-232(简称RS232),它被广泛用于DCE(Data Communication Equipment ) 和 DTE(Data Terminal Equipment) 之间的连接。DCE可以理解为数据通信端,比如modem设备;DTE可以理解为数据终端,比如电脑。最早的台式电脑都会保留9针的232接口,用于串口通信,目前基本被USB接口取代。现在RS232接口常用于仪器仪表设备,PLC以及嵌入式领域当作调试口来使用。
- RS-232规定的标准传送速率有50b/s、75b/s、110b/s、150b/s、300b/s、600b/s、1200b/s、2400b/s、4800b/s、9600b/s、19200b/s,可以灵活地适应不同速率的设备。对于慢速外设,可以选择较低的传送速率:反之,可以选择较高的传送速率。
- RS-232是现在主流的串行通信接口之一。由于RS232接口标准出现较早,难免有不足之处,主要有以下四点:
(1)接口的信号电平值较高,易损坏接口电路的芯片。RS232接口任何一条信号线的电压均为负逻辑关系。即:逻辑“1”
为-3—-15V;逻辑“0”:+3—+15V,噪声容限为2V。即要求接收器能识别高于+3V的信号作为逻辑“0”,低于-3V的信
号作为逻辑“1”,TTL电平为5V为逻辑正,0为逻辑负。与TTL电平不兼容故需使用电平转换电路方能与TTL电路连接。
(2)传输速率较低,在异步传输时,比特率为20Kbps;因此在51CPLD开发板中,综合程序波特率只能采用19200,也是
这个原因。
(3)接口使用一根信号线和一根信号返回线而构成共地的传输形式,这种共地传输容易产生共模干扰,所以抗噪声干扰
性弱。
(4)传输距离有限,最大传输距离标准值为50英尺,实际上也只能用在15米左右。
- 在旧式的台式计算机中一般会有 RS-232 标准的 COM 口(也称 DB9 接口),见下图。

- 其中接线口以针式引出信号线的称为公头,以孔式引出信号线的称为母头。在计算机中一般引出公头接口,而在调制调解器设备中引出的一般为母头,使用上图中的串口线即可把它与计算机连接起来。通讯时,串口线中传输的信号就是使用前面讲解的 RS-232 标准调制的。
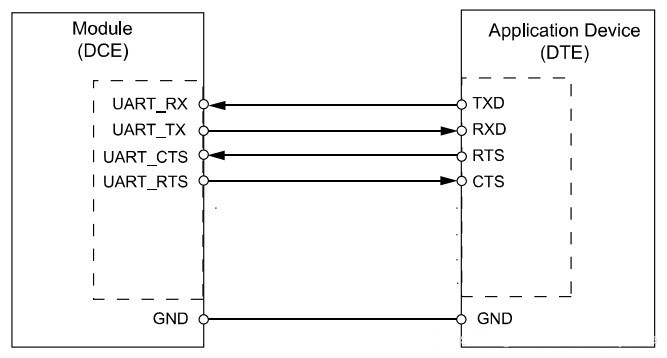
- 在这种应用场合下,DB9 接口中的公头及母头的各个引脚的标准信号线接法见下图。

- DB9 信号线说明(公头,为方便理解,可把 DTE 理解为计算机, DCE 理解为调制解调器)如下图:

- 硬件连接:
- 9线式连接示意图:

- 5线式连接示意图:
- 3线式连接示意图:

- 在目前的其它工业控制使用的串口通讯中,一般只使用 RXD、 TXD 以及 GND 三条信号线,直接传输数据信号,我们的iCore4T扩展底板也是采用3线连接的。3线连接中,DTE使用TXD和RXD两条数据线,无法实现硬件流控功能,在做大量数据传输应用时,建议使用5线或9线连接方式。
2、协议层:
- 串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据。串口数据包的基本组成如下图:

- 1. 波特率
- 本实验中主要讲解的是串口异步通讯,异步通讯中由于没有时钟信号(如前面的 DB9接口中是没有时钟信号的),所以两个通讯设备之间需要约定好波特率,即每个码元的长度,以便对信号进行解码,上图中用虚线分开的每一格就是代表一个码元。常见的波特率为4800、 9600、 115200 等。
- 2. 通讯的起始和停止信号
- 串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0 的数据位表示,而数据包的停止信号可由 0.5、 1、 1.5 或 2 个逻辑 1 的数据位表示,只要双方约定一致即可。
- 3. 有效数据
- 在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为 5、 6、 7 或 8 位长。
- 4. 数据校验
- 在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、 0 校验(space)、 1 校验(mark)以及无校验(noparity),它们介绍如下:
- 奇校验要求有效数据和校验位中“1”的个数为奇数,比如一个 8 位长的有效数据为: 01101001,此时总共有 4 个“1”,为达到奇校验效果,校验位为“1”,最后传输的数据将是 8 位的有效数据加上 1 位的校验位总共 9 位。
- 偶校验与奇校验要求刚好相反,要求帧数据和校验位中“1”的个数为偶数,比如数据帧: 11001010,此时数据帧“1”的个数为 4 个,所以偶校验位为“0”。
- 0 校验是不管有效数据中的内容是什么,校验位总为“0”, 1 校验是校验位总为“1”。
- 在无校验的情况下,数据包中不包含校验位。
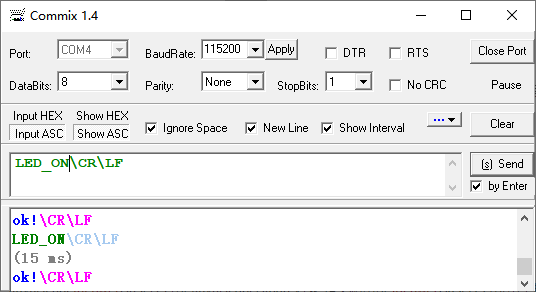
- 在本实验中,我们通过连接RS-232,经SP3232芯片转换后可与计算机通讯。通过串口工具来接收串口发送的数据和向串口发送给数据。用串口工具打开iCore4T对应的端口,波特率设为115200,发送相应的命令,便可以控制ARM_LED的亮灭情况。串口命令如下表:
| LED_ON\r\n | LED灯亮 |
| LED_OFF\r\n | LED灯灭 |
* 原理图:

四、 实验程序
1.主函数
int main(void) { int i; char buffer[20]; HAL_Init(); SystemClock_Config(); i2c.initialize(); axp152.initialize(); axp152.set_dcdc1(3500);//[ARM & FPGA BK1/2/6 &OTHER] axp152.set_dcdc2(1200);//[FPGA INT & PLL D] axp152.set_aldo1(2500);//[FPGA PLL A] axp152.set_dcdc4(3300);//[POWER_OUTPUT] axp152.set_dcdc3(3300);//[FPGA BK4][Adjustable] axp152.set_aldo2(3300);//[FPGA BK3][Adjustable] axp152.set_dldo1(3300);//[FPGA BK7][Adjustable] axp152.set_dldo2(3300);//[FPGA BK5][Adjustable] HAL_Delay(100); MX_GPIO_Init(); MX_USART1_UART_Init(); usart1.initialize(115200);//串口波特率设置 usart1.printf("Hello, I am iCore4T\r\n");//串口信息输出 LED_ON; while (1) { if(usart1.receive_ok_flag){ //接收完成 usart1.receive_ok_flag = 0; for(i = 0;i < 20;i++){ buffer[i] = tolower(usart1.receive_buffer[i]); }//比较接收信息 if(memcmp(buffer,"led_on",strlen("led_on")) == 0){ LED_ON; usart1.printf("ok!\r\n"); } if(memcmp(buffer,"led_off",strlen("led_off")) == 0){ LED_OFF; usart1.printf("ok!\r\n"); } } } }
2.UART结构体定义
UART_HandleTypeDef huart1;
- UART的名称定义,这个结构体中存放了UART所有用到的功能,后面的别名就是我们所用的UART串口的别名。
typedef struct __UART_HandleTypeDef { USART_TypeDef *Instance; //UART寄存器基地址 UART_InitTypeDef Init; //UART通信参数 uint8_t * pTxBuffPtr; //指向UART Tx传输缓冲区的指针 uint16_t TxXferSize; //UART Tx传输大小 __IO uint16_t TxXferCount; //UART Tx传输计数器 uint8_t * pRxBuffPtr; //指向UART Rx传输缓冲区的指针 uint16_t RxXferSize; //UART Rx传输大小 __IO uint16_t RxXferCount; //UART Rx传输计数器 DMA_HandleTypeDef * hdmatx; //UART Tx DMA句柄参数 DMA_HandleTypeDef * hdmarx; //UART Rx DMA句柄参数 HAL_LockTypeDef Lock; //锁定对象 __IO HAL_UART_StateTypeDef gState; //与全局句柄管理有关的UART状态信息并且与Tx操作有关。 __IO HAL_UART_StateTypeDef RxState; //与Rx操作有关的UART状态信息 __IO uint32_t ErrorCode; //UART错误代码 } UART_HandleTypeDef;
3.串口发送/接收函数
- HAL_UART_Transmit();串口发送数据,使用超时管理机制
- HAL_UART_Receive();串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT();串口中断模式发送
- HAL_UART_Receive_IT();串口中断模式接收
- HAL_UART_Transmit_DMA();串口DMA模式发送
- HAL_UART_Transmit_DMA();串口DMA模式接收
- 串口发送数据
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
- 功能:串口发送指定长度的数据。如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT)。
- 参数:
- UART_HandleTypeDef*huart UATR的别名 如: UART_HandleTypeDef huart2;别名就是huart2
- *pData 需要发送的数据
- Size 发送的字节数
- Timeout 最大发送时间,发送数据超过该时间退出发送
- 中断接收数据:
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
- 功能:串口中断接收,以中断方式接收指定长度数据。
- 大致过程:设置数据存放位置,接收数据长度,然后使能串口接收中断。接收到数据时,会触发串口中断。之后,串口中断函数处理,直到接收到指定长度数据,而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
- 参数:
- UART_HandleTypeDef *huart UATR的别名
- *pData 接收到的数据存放地址
- Size 接收的字节数
4.串口中断函数
HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数 HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //串口发送中断回调函数 HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart); //串口发送一半中断回调函数(用的较少) HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //串口接收中断回调函数 HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart); //串口接收一半回调函数(用的较少) HAL_UART_ErrorCallback(); //串口接收错误函数
- 串口接收中断回调函数
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
- 功能:HAL库的中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码,串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改。
- 参数:
- UART_HandleTypeDef *huart UATR的别名
- 串口中断处理函数
HAL_UART_GetState(); HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
- 功能:对接收到的数据进行判断和处理 判断是发送中断还是接收中断,然后进行数据的发送和接收,在中断服务函数中使用
- 串口查询函数
HAL_UART_GetState(); //判断UART的接收是否结束,或者发送数据是否忙碌
五、 实验步骤
- 把仿真器与iCore4T的SWD调试口相连(直接相连或者通过转接器相连);
- 将扩展板的RS232接口与相应的转换模块相连。
- 将转换模块与PC机相连。
- 把iCore4T通过Micro USB线与计算机相连,为iCore4T供电;
- 打开 Keil MDK 开发环境,并打开本实验工程;
- 烧写程序到 iCore4T 上;
- 也可以进入Debug 模式,单步运行或设置断点验证程序逻辑。
六、 实验现象
通过串口输入命令可以控制LED的亮灭。
icore4t_53.txt · 最后更改: 2022/04/01 10:56 由 sean
除额外注明的地方外,本维基上的内容按下列许可协议发布: 豫ICP备18022004号-1
