
icore4tfpga_16
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-02-26 | gingko | 初次建立 |
实验十六:串口通信实验——基于FPGA实现UART通信
一、 实验目的与意义
- 掌握UART协议及实现方法。
- 掌握QuartusII的使用方法。
二、 实验设备及平台
- iCore4T 双核心板。
- iCore4T 底板(杜邦线一套)。
- iTool3(串口TTL)。
- Blaster(或相同功能)仿真器。
- Micro USB线缆。
- Keil MDK 开发平台。
- Quartus开发平台。
- 电脑一台。
三、 实验原理
- UART(通用异步收发器)是一种通用串行数据总线,用于异步通信,可实现全双工传输和接收,是做硬件开发时常用的一种硬件接口。USART(通用同步异步收发器)在UART的基础上增加了同步功能,即USART是UART的增强型,异步通信的时候和UART没有区别。 UART通信具有两根信号线,一根用于发送数据,一根用于接收数据。然而数据的传输是按照字节进行传输的,因此在发送时需要将并行数据转换成串行数据,接收时需要将串行数据转换成并行数据。
- UART通信传输是以帧位单位的,每帧数据有4部分构成:起始位、数据位、奇偶校验位和停止位。以8位字长的串口发送数据帧为例,其帧协议如图16.1所示,从图中可以看到,初始状态时,传输线上为高电平,在持续一个波特的低电平之后,是发送的有效数据。之后是至少一个波特高电平的停止位。

- 在UART通信中有一个重要的参数,即波特率,它表征了串口的传输速度,表示1秒内传输的二进制位的个数,波特率越大速度越快,反之,越慢。
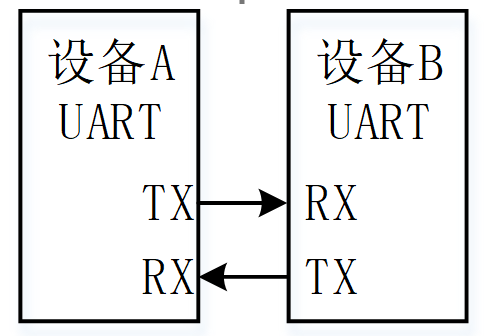
- UART接线原则:RX←→TX,TX←→RX,如图16.2所示。
四、 代码讲解
- 本实验以115200波特率为例,表示1秒钟传输115200个二进制位,每位传输需要时间位1/115200s,为保证每位数据被锁存时处于稳定状态,所以尽量保证在每位的中间位置进行锁存。本实验采用的是16等分的方法,即利用高频时钟(16倍波特率,该时钟由锁相环提供)将每位数据进行16等分,同时进行计数,当计数到8时可保证时钟处于数据的中间位置,此时对数据进行锁存。本实验的整个流程:首先,通过串口调试助手发送一字节的任意数据;FPGA收到该数据后,直接将数据返还给调试助手。
- 在整个实现过程中最主要的模块有发送模块和接收模块两个。其中接收模块主要负责接收信号线上的串行数据,将数据转换成并行数据,接收完成并产生一个接收完成标志。整个过程由状态机实现,其代码如下:
/*************************************************/ //接收模块 always @ (posedge pll_1_8m or negedge rst_n) begin if(!rst_n) begin rx_cnt <= 8'd0;; uart_rdata_r <= 8'd0; uart_rdata <= 8'd0; parity_bit <= 1'd0; receive_over_r <= 1'd0; end else begin case(rx_cnt) //判断信号线是否有变化(信号线正常情况下位高电平,有低电平表示信号有变化) 8'd0:begin if(!rxd) begin rx_cnt <= rx_cnt + 1'd1; end else begin rx_cnt <= rx_cnt; end end //判断信号线变化是否为数据起始位(信号线稳定后仍为低电平,表示为真正的数据起始位) 8'd8:begin if(!rxd) begin rx_cnt <= rx_cnt + 1'd1; end else begin rx_cnt <= 8'd0; end end //接收数据0位 8'd24:begin uart_rdata_r[0] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据1位 8'd40:begin uart_rdata_r[1] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据2位 8'd56:begin uart_rdata_r[2] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据3位 8'd72:begin uart_rdata_r[3] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据4位 8'd88:begin uart_rdata_r[4] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据5位 8'd104:begin uart_rdata_r[5] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据6位 8'd120:begin uart_rdata_r[6] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收数据7位 8'd136:begin uart_rdata_r[7] <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收校验位(无校验) 8'd152:begin parity_bit <= rxd; rx_cnt <= rx_cnt + 1'd1; end //接收停止位 8'd168:begin rx_cnt <= rx_cnt + 1'd1; uart_rdata <= uart_rdata_r; end //接收完成标志拉高两个时钟 8'd175:begin receive_over_r <= 1'd1; rx_cnt <= rx_cnt + 1'd1; end 8'd177:begin receive_over_r <= 1'd0; rx_cnt <= rx_cnt + 1'd1; end //判断是否发送完成 8'd178:begin if(send_over) begin rx_cnt <= 8'd0; end else begin rx_cnt <= rx_cnt; end end default:begin rx_cnt <= rx_cnt + 1'd1; end endcase end end /*************************************************/
- 发送模块主要负责将接收到的完整数据转换成串行数据,通过发送信号线串行输出,发送完成后产生发送完成标志。其代码如下:
/*************************************************/ //发送模块 always @ (posedge pll_1_8m or negedge rst_n) begin if(!rst_n) begin tx_cnt <= 8'd255; tx_r <= 1'd1; send_over_r <= 1'd0; end else begin case(tx_cnt) 8'd255:begin if(receive_over) begin tx_cnt <= tx_cnt + 1'd1; end else begin tx_cnt <= tx_cnt; end end 8'd0:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= 1'd0;//发送起始位 end 8'd16:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[0];//发送数据0位 end 8'd32:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[1];//发送数据1位 end 8'd48:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[2];//发送数据2位 end 8'd64:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[3];//发送数据3位 end 8'd80:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[4];//发送数据4位 end 8'd96:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[5];//发送数据5位 end 8'd112:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[6];//发送数据6位 end 8'd128:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= tx_data[7];//发送数据7位 end 8'd144:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= 1'bz; //发送校验位 end 8'd160:begin tx_cnt <= tx_cnt + 1'd1; tx_r <= 1'd1;//发送停止位 end 8'd168:begin tx_cnt <= tx_cnt + 8'd1; tx_r <= 1'd1; //一帧数据发送结束 end 8'd175:begin tx_cnt <= tx_cnt + 8'd1; send_over_r <= 1'd1; end 8'd177:begin tx_cnt <= 8'd255; send_over_r <= 1'd0; end default:begin tx_cnt <= tx_cnt + 8'd1; tx_r <= tx_r; end endcase end end /*************************************************/
五、 实验步骤及实验结果
 1、将硬件正确连接,如图16.3所示。
1、将硬件正确连接,如图16.3所示。
2、将编写好的代码进行编译,并下载到开发板中;
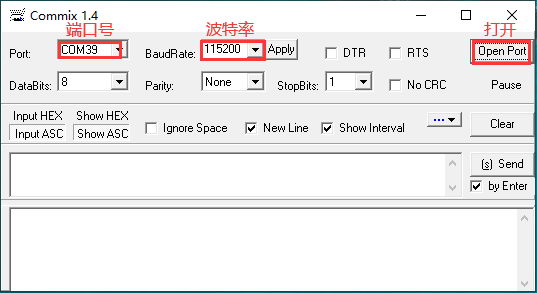
3、打开串口调试工具,波特率设置为115200,并打开对应端口,如图16.4所示;
 4、在串口调试工具的发送区输入发送数据,FPGA会自动将接收到的数据发送至串口,显示在串口调试工具的接收区,如图16.5所示。
4、在串口调试工具的发送区输入发送数据,FPGA会自动将接收到的数据发送至串口,显示在串口调试工具的接收区,如图16.5所示。

六、 拓展实验
- 通过Signaltap观察串口通信时序。
icore4tfpga_16.txt · 最后更改: 2024/04/10 15:26 由 zhaowenzhe
除额外注明的地方外,本维基上的内容按下列许可协议发布: 豫ICP备18022004号-1
