
modbus_tcp实验_电源监控
目录
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-07-09 | gingko | 初次建立 |
实验二十六:MODBUS TCP实验——电源监控
一、 实验目的与意义
- 了解MODBUS TCP结构。
- 了解MODBUS TCP特征。
- 掌握MODBUS TCP的使用方法。
- 掌握KEIL MDK 集成开发环境使用方法。
二、 实验设备及平台
三、 实验原理
=== 1、Modbus TCP通信概述 ===
- MODBUS/TCP是简单的、中立厂商的用于管理和控制自动化设备的MODBUS系列通讯协议的派生产品,显而易见,它覆盖了使用TCP/IP协议的“Intranet”和“Internet”环境中MODBUS报文的用途。协议的最通用用途是为诸如PLC’s,I/O模块,以及连接其它简单域总线或I/O模块的网关服务的。
- MODBUS/TCP使MODBUS_RTU协议运行于以太网,MODBUS TCP使用TCP/IP和以太网在站点间传送MODBUS报文,MODBUS TCP结合了以太网物理网络和网络标准TCP/IP以及以MODBUS作为应用协议标准的数据表示方法。MODBUS TCP通信报文被封装于以太网TCP/IP数据包中。与传统的串口方式,MODBUS TCP插入一个标准的MODBUS报文到TCP报文中,不再带有数据校验和地址。
- Modbus TCP传输过程中使用了TCP/IP以太网参考模型的5层:
- 第一层:物理层,提供设备物理接口,与市售介质/网络适配器相兼容
- 第二层:数据链路层,格式化信号到源/目硬件址数据帧
- 第三层:网络层,实现带有32位IP址IP报文包
- 第四层:传输层,实现可靠性连接、传输、查错、重发、端口服务、传输调度
- 第五层:应用层,Modbus协议报文
- Modbus/TCP的通信系统可以包括不同类型的设备。所有连接到Modbus/TCP通讯网络的设备都通过Modbus事务报文来实现Modbus客户端和服务器端之间的通讯任务。而Modbus客户端和服务器TCP/IP网关则实现了将在串行链路上的Modbus通讯设备连入到Modbus/TCP通讯网络。如图所示:

- Modbus在TCP/IP上使用专用报文头识别Modbus应用数据单元。这种报文头成为MBAP报文头。Modbus在TCP/IP网络上的应用数据单元如图所示。

2、Modbus TCP的功能代码
- 按照使用的通途区分,共有3种类型分别为:
- (1)公共功能代码:已定义好功能码,保证其唯一性,由Modbus.org认可;
- (2)用户自定义功能代码有两组,分别为65~72和100~110,无需认可,但不保证代码使用唯一性,如变为公共代码,需交RFC认可;
- (3)保留功能代码,由某些公司使用某些传统设备代码,不可作为公共用途。
- 按照应用深浅,可分为3个类别:
- (1)类别0,客户机/服务器最小可用子集:读多个保持寄存器(fc.3);写多个保持寄存器(fc.16)。
- (2)类别1,可实现基本互易操作常用代码:读线圈(fc.1);读开关量输入(fc.2);读输入寄存器(fc.4);写线圈(fc.5);写单一寄存器(fc.6)。
- (3)类别2,用于人机界面、监控系统例行操作和数据传送功能:强制多个线圈(fc.15);读通用寄存器(fc.20);写通用寄存器(fc.21);屏蔽写寄存器(fc.22);读写寄存器(fc.23)。
- 本实验使用的03功能码读取保持寄存器中的数据。
3、LAN8720A简介
- LAN8720A功能框图如图所示:
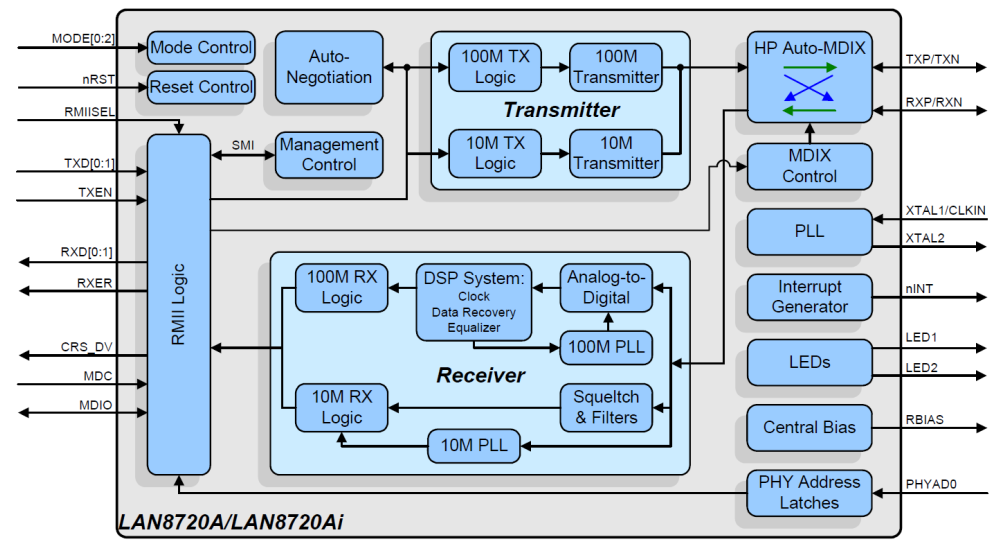
- LAN8720A是低功耗的10/100M以太网PHY层芯片,I/O引脚电压符合IEEE802.3-2005标准,支持通过RMII接口与以太网MAC层通信,内置10-BASE-T/100BASE-TX全双工传输模块,支持10Mbps和100Mbps。
- LAN8720A可以通过自协商的方式与目的主机最佳的连接方式(速度和双工模式),支持HPAuto-MDIX自动翻转功能,无需更换网线即可将连接更改为直连或交叉连接。LAN8720A的主要特点如下:
- 高性能的10/100M以太网传输模块
- 支持RMII接口以减少引脚数
- 支持全双工和半双工模式
- 两个状态LED输出
- 可以使用25M晶振以降低成本
- 支持自协商模式
- 支持HPAuto-MDIX自动翻转功能
- 支持SMI串行管理接口
- 支持MAC接口
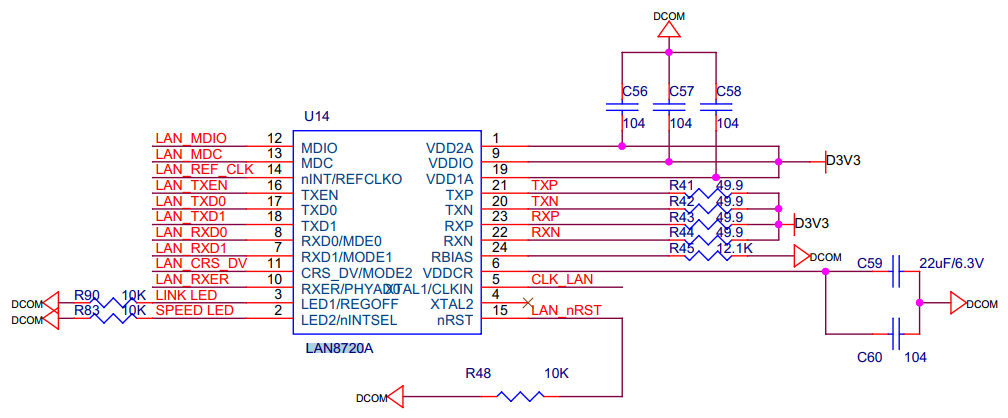
4、原理图
- iCore4带有lan8720a嵌入式以太网控制器,本实验实现MODBUS TCP功能。MODBUS是开放协议,IANA给协议赋予TCP端口502,iCore4的IP地址为192.168.0.10,PC的IP地址为192.168.0.2,在建立客户端与服务器之间的TCP连接后,MODBUS即可通信。实验原理图如下:
四、 实验程序
1、主函数
int main(void) { system_clock.initialize(); //系统时钟初始化 led.initialize(); //LED初始化 adc.initialize(); //ADC初始化 delay.initialize(216); //延时初始化 my_malloc.initialize(SRAMIN); //动态内存初始化 usart6.initialize(115200); //串口波特设置 usart6.printf("\033[1;32;40m"); //设置字体终端为绿色 usart6.printf("\r\nHello, I am iCore4!\r\n\r\n"); //串口信息输出 OSInit(); //UCOS初始化 while(lwip.initialize()) //lwip初始化 { LED_RED_ON; usart6.printf("\r\nETH initialize error!\r\n\r\n");//ETH初始化失败 } modbus.initialize(); //modbus初始化 OSTaskCreate(start_task,(void*)0,(OS_STK*)&START_TASK_STK[START_STK_SIZE-1],START_TASK_PRIO); OSStart(); //开启UCOS }
2、开始任务
void start_task(void *pdata) { OS_CPU_SR cpu_sr; pdata = pdata ; OSStatInit(); //初始化统计任务 OS_ENTER_CRITICAL(); //关中断 OSTaskCreate(led_task,(void*)0,(OS_STK*)&LED_TASK_STK[LED_STK_SIZE-1],LED_TASK_PRIO);//创建LED任务 OSTaskCreate(display_task,(void*)0,(OS_STK*)&DISPLAY_TASK_STK[DISPLAY_STK_SIZE-1],DISPLAY_TASK_PRIO); //显示任务 OSTaskSuspend(OS_PRIO_SELF); //挂起start_task任务 OS_EXIT_CRITICAL(); //开中断 }
3、LwIP初始化
//LWIP初始化(LWIP启动的时候使用) //返回值:0,成功 // 1,内存错误 // 2,LAN8720初始化失败 // 3,网卡添加失败. u8 lwip_comm_init(void) { OS_CPU_SR cpu_sr; struct netif *Netif_Init_Flag; //调用netif_add()函数时的返回值,用于判断网络初始化是否成功 struct ip_addr ipaddr; //ip地址 struct ip_addr netmask; //子网掩码 struct ip_addr gw; //默认网关 if(lan8720.memory_malloc())return 1; //内存申请失败 if(lwip_comm_mem_malloc())return 1; //内存申请失败 if(lan8720.initialize())return 2; //初始化LAN8720失败 tcpip_init(NULL,NULL); //初始化tcp ip内核,该函数里面会创建tcpip_thread内核任务 lwip_comm_default_ip_set(&lwipdev); //设置默认IP等信息 #if LWIP_DHCP //使用动态IP ipaddr.addr = 0; netmask.addr = 0; gw.addr = 0; #else //使用静态IP IP4_ADDR(&ipaddr,lwipdev.ip[0],lwipdev.ip[1],lwipdev.ip[2],lwipdev.ip[3]); IP4_ADDR(&netmask,lwipdev.netmask[0],lwipdev.netmask[1] ,lwipdev.netmask[2],lwipdev.netmask[3]); IP4_ADDR(&gw,lwipdev.gateway[0],lwipdev.gateway[1],lwipdev.gateway[2],lwipdev.gateway[3]); usart6.printf("网卡en的MAC地址为:................%d.%d.%d.%d.%d.%d\r\n",lwipdev.mac[0],lwipdev.mac[1],lwipdev.mac[2],lwipdev.mac[3],lwipdev.mac[4],lwipdev.mac[5]); usart6.printf("静态IP地址........................%d.%d.%d.%d\r\n",lwipdev.ip[0],lwipdev.ip[1],lwipdev.ip[2],lwipdev.ip[3]); usart6.printf("子网掩码..........................%d.%d.%d.%d\r\n",lwipdev.netmask[0],lwipdev.netmask[1],lwipdev.netmask[2],lwipdev.netmask[3]); usart6.printf("默认网关..........................%d.%d.%d.%d\r\n",lwipdev.gateway[0],lwipdev.gateway[1],lwipdev.gateway[2],lwipdev.gateway[3]); #endif Netif_Init_Flag=netif_add(&lwip_netif,&ipaddr,&netmask,&gw,NULL,ðernetif_init,&tcpip_input);//向网卡列表中添加一个网口 #if LWIP_DNS dns_init(); #endif if(Netif_Init_Flag==NULL)return 3;//网卡添加失败 else//网口添加成功后,设置netif为默认值,并且打开netif网口 { netif_set_default(&lwip_netif); //设置netif为默认网口 netif_set_up(&lwip_netif); //打开netif网口 } return 0;//操作OK. }
4、MODBUS初始化
static INT8U modbus_socket_init(void) { INT8U res; OS_CPU_SR cpu_sr; OS_ENTER_CRITICAL(); //关中断 res = OSTaskCreate(modbus_task,(void*)0,(OS_STK*)&MODBUS_TASK_STK[MODBUS_STK_SIZE-1],MODBUS_PRIO); //创建TCP服务器线程 OS_EXIT_CRITICAL(); //开中断 return res; }
5、MODBUS任务
static void modbus_task(void *arg) { int modbus_sock, size; struct sockaddr_in address, remotehost; while(1) { /* 创建一个TCP套接字 */ if ((modbus_sock = socket(AF_INET, SOCK_STREAM, 0)) < 0) { usart6.printf("can not create socket\r\n"); OSTimeDlyHMSM(0, 0, 1, 0); continue; } address.sin_family = AF_INET; address.sin_port = htons(502); // mosbus tcp端口 address.sin_addr.s_addr = INADDR_ANY; if (bind(modbus_sock, (struct sockaddr *)&address, sizeof (address)) < 0) { usart6.printf("can not bind socket\r\n"); closesocket(modbus_sock); close(modbus_sock); OSTimeDlyHMSM(0, 0, 2, 0); continue; } /* 监听传入的连接 */ listen(modbus_sock, 1); size = sizeof(remotehost); modbus_conn = accept(modbus_sock, (struct sockaddr *)&remotehost, (socklen_t *)&size); if (modbus_conn >= 0) { closesocket(modbus_sock); close(modbus_sock); usart6.printf("connect socket\r\n"); modbus_tcp_server(modbus_conn); } else { close(modbus_sock); close(modbus_conn); } } }
五、 实验步骤
- 把仿真器与iCore4的SWD调试口相连(直接相连或者通过转接器相连);
- 将跳线冒插在USB UART;
- 把iCore4(USB UART)通过Micro USB线与计算机相连,为iCore4供电;
- 设置电脑IP;(设置方法见附录1)
- 把iCore4网口通过网线与计算机网口相连;
- 打开Modbus Poll;(Modbus Poll安装方法及使用方法见附录2)
- 打开Keil MDK 开发环境,并打开本实验工程;
- 烧写程序到iCore4上;
- 也可以进入Debug模式,单步运行或设置断点验证程序逻辑。
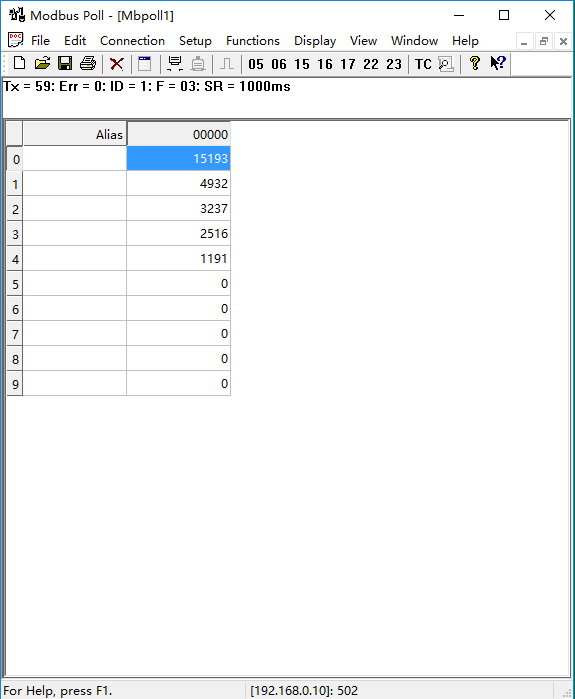
六、 实验现象
- 电源监控如下图所示:
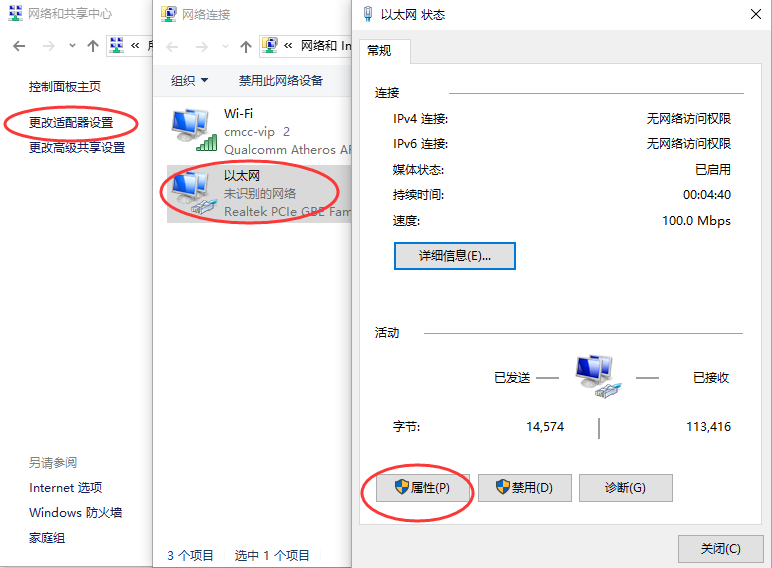
附录1:
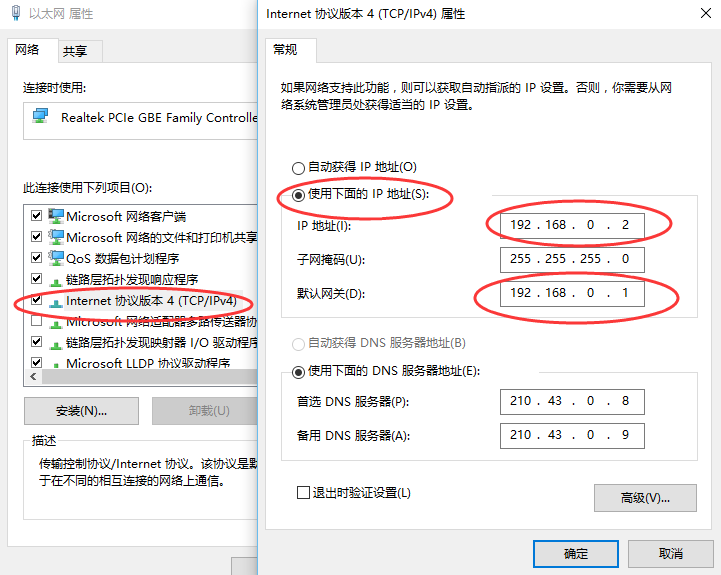
1、打开控制面板—→网络和Internet—→网络和共享中心—→更改适配器设置—→以太网—→属性
 2、Internet协议版本4—→选择使用下面的IP地址(如下图所示),然后更改IP地址和默认网关
2、Internet协议版本4—→选择使用下面的IP地址(如下图所示),然后更改IP地址和默认网关
附录2:
1、选择相应的位(32 位或 64 位)双击,NEXT—→NEXT—→Install—→NEXT—→Finished.
2、打开Modbus Poll,点击Connection—→connect,输入SN.txt中的序列号。
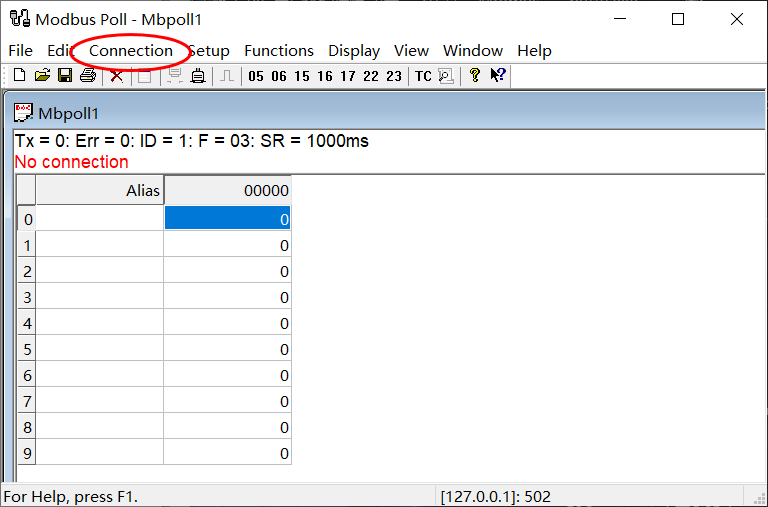 3、按下图进行设置,点击 OK 即可。
3、按下图进行设置,点击 OK 即可。

modbus_tcp实验_电源监控.txt · 最后更改: 2022/03/22 10:24 由 sean
除额外注明的地方外,本维基上的内容按下列许可协议发布: 豫ICP备18022004号-1
